A very original and thoroughgoing development of the theory of probability, which does not depend on the concept of frequency in an ensemble, has been given by Keynes. In his view, the theory of probability is an extended logic, the logic of probable inference. Probability is a relation between a hypothesis and a conclusion, corresponding to the degree of rational belief and limited by the extreme relations of certainty and impossibility. Classical deductive logic, which deals with these limiting relations only, is a special case in this more general development.
R. T. Cox
Probability, Frequency, and Reasonable Expectation
(Yep, that Keynes! He was an influential early Bayesian thinker as well as a famous economist)
Cox’s famous theorem says that if your way of reasoning is not in some sense isomorphic to Bayesianism, then you are violating one of the following ten basic principles. I’ll derive the theorem in this post.
Logic
- ~~a = a
- ab = ba
- (ab)c = a(bc)
- aa = a
- ~(ab) = ~a or ~b
- a(a or b) = a
Reasoning under uncertainty
- Degrees of plausibility are represented by real numbers: {b | a}
- {bc | a} = F({b | a}, {c | ab})
- {~b | a} = G({b | a})
- F and G are monotonic.
The first six, I think, need no introduction. I write “a and b” as “ab” for aesthetics.
The next four extend logic beyond the realm of the perfectly certain, and relate to how we should reason in the presence of uncertainty – how we should reason about degrees of plausibility. For this step, we need a new notation: a way to represent not the truth of a proposition a, but its plausibility. We do this with the {} notation: {a | b} = the plausibility of a given that b is known to be true.
I’ll make some brief notes about each of 7 through 10.
Number 7 perhaps sounds strange – plausibilities are states of belief, not numbers. But you can make sense of this in two ways: first, we can consider this a simple model of plausibilities, in which we are merely mirroring the properties of plausibilities in the structure of the system we set up around how to manipulate numbers. And second, if one is to design a robot that reasons about the world, it isn’t crazy to think about programming it to represent beliefs about the plausibilities of propositions as numbers.
#7 also contains an assumption of continuity – that it’s not the case that there are discontinuous jumps in the plausibility of propositions. Said another way, if two different real numbers represent two different degrees of plausibility, then every possible value between them should also represent a degree of plausibility.
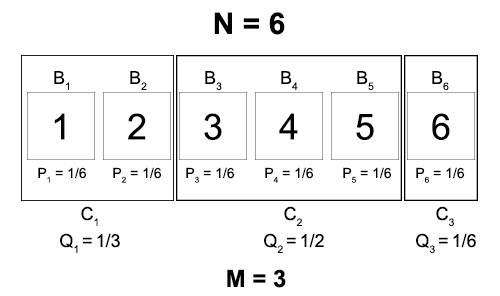
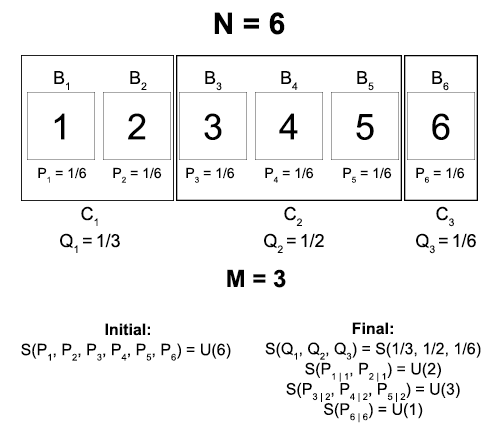
Number 8 is about relevance. It says that the plausibility that b and c are both true given some background information a, is only dependent on (1) the plausibility that b is true given a and (2) the plausibility that c is true given a and b.
If you want to know how likely it is that b and c are both true given a, you can break the process down into two steps. First you determine how likely it is that b is true, given your background information. And second, you determine how likely it is that a is true, given both your background information and the truth of b.
In other words, all that you need to know if you want to know {bc | a} are {b | a} and {c | ab}. For example, say that you want the plausibility of Usain Bolt winning the 100 meter dash and also running an extra lap around the track at the end of the dash. The only pieces of information you need for this are (1) the plausibility of Usain Bolt winning the 100 meter dash, and (2) the plausibility of him running an extra lap at the end of the race, given that he won the race. And of course, each of these plausibilities are also conditional on all of the background information you have about the situation.
We give the name F to the function that details precisely how we determine {bc | a}.
Number 9 says that all we need to determine the plausibility of a proposition being false is the plausibility of the proposition being true. The function that details how we determine one from the other is named G.
And finally, Number 10 says that the plausibility relationships described in 8 and 9 are in some sense simple. For instance, if b becomes less plausible and ~b becomes more plausible, then if b becomes even less plausible, ~b should not suddenly become less plausible. If a change in the plausibility of a proposition a makes the plausibility of another proposition b change in a certain direction, then a greater change in the plausibility of a in the same direction should not result in a reversal of the direction of change of the plausibility of b.
There is an additional implicit assumption that is almost too obvious to be stated: If two propositions are just different phrasings of the same state of knowledge, then you should have the same plausibility in both of them. This is the basic requirement of consistency. It says, for instance, that “a and b” is exactly as plausible as “b and a”.
***
Now we can derive Bayesianism!
First step: conditional probabilities. We use the associativity of “and”:
{bcd | a} = F( {b | a}, {cd | ab} ) = F( {b | a}, F( {c | ab}, {d | abc} ) )
{bcd | a} = F( {bc | a}, {d | abc} ) = F( F({b | a}, {c | ab}), {d | abc} ) )
So F(x, F(y, z)) = F(F(x, y), z)
Any monotonic function that satisfies this functional equation is isomorphic to ordinary multiplication on the interval [0, 1].
In other words, there exists a function W such that:
W(F(x, y)) = W(x) · W(y)
From which we can see:
W({bc | a}) = W({b | a}) · W({c | ab})
Which is exactly the form of conjunction in ordinary probability theory!
This means that any form of reasoning about the plausibility of conjunctions of propositions is either violating one of the 10 axioms, or is equivalent to probability theory up to isomorphism.
So if somebody walks up to you and presents to you an algorithm for computing the plausibility of the conjunction of two propositions, and you know that they are following the above ten rules, then you are guaranteed to be able to find some function that takes in their algorithm and translates into ordinary Bayesianism.
This translation function is W! Notice that although W looks a lot like ordinary probability, it is a different thing entirely. For instance, if somebody is already reasoning with ordinary probability theory, then {b | a} = P(b | a). To convert {b | a} into P(b | a), then, W need not do anything! So W({b | a}) = {b | a} = P(b | a), or W(x) = x, which is clearly different from the probability function.
Next, we reveal the nature of the function G.
The first step is easy:
{~~b | a} = G(G({b | a}))
So G(G(x)) = x
This means that G is an involution – a function that is its own inverse.
Next, we use the commutativity of “and”:
W({bc | a}) = W({b | a}) · W({c | ab})
= W({b | a}) · G( W({~c | ab}) )
= W({b | a}) · G( W({b~c | a}) / W({b | a}) )
So W({cb | a}) = W({c | a}) · G( W({~bc | a}) / W({c | a}) )
Now if we let c = ~(bd) for some new statement d, and rename W(b | a) = x and W(c | a) = y, we find:
x G( G(y) / x ) = y G( G(x) / y )
The only functions that satisfy this functional equation as well as the earlier involution equation are the following:
G(x) = (1 – xm)1/m, for any m
With some algebraic manipulation, we see that this is equivalent to:
W({a | b})m + W({~a | b})m = 1
This equation almost perfectly represents the normalization rule: that the total probability must sum to 1! It seems mildly inconvenient that this holds true for the function Wm rather than W. If we knew that m had to equal 1, then we’d have a perfect translation function both for conditional probabilities and for normalization… But if we look back at our conditional probability finding, we notice that it can be equivalently represented in terms of Wm instead of W!
W({bc | a}) = W({b | a}) · W({c | ab})
W({bc | a})m = W({b | a})m · W({c | ab})m
Now we just define one last function Q = Wm, and we’re done!
Q takes in any system of reasoning that obeys the starting ten rules, and reveals it to be equivalent to ordinary probability theory.
The rest of probability theory can be shown to result from these basic axioms (we’ll drop the brackets now, and will call Q({a | b}) its proper name: P(a | b).
P(certainty) = 1
P(impossibility) = 0
P(bc | a) + P(b~c | a) = P(b | a)
P(a or b | c) = P(a | c) + P(b | c) – P(ab | c)
And so on.
This derivation of probability theory is great because it isn’t limited by the ordinary frequency interpretations of probability theory, in which a probability is defined to be a limit of a ratio of an infinite number of experimental results. This is not only ugly theoretically, but leaves us puzzled as to how to talk about the probabilities of one-shot events or of hypotheses that can’t be directly translated into empirical results.
The definition of probability invoked here is infinitely deeper. Instead of frequencies, probabilities are defined according to fundamental principles of normative epistemology. Any agent that reasons consistently according to a few basic maxims will be reasoning in a way that is functionally identical to probability theory.
And probabilities here can be assigned to any propositions – not just those that refer to empirically measurable events that are repeatable ad infinitum. They represent a normative rational degree of certainty that one must possess if one is to reason consistently!