Classification is one of the most basic human activities. We wake up to a world of vibrant experience and immediately begin structuring it, organizing it into objects and actions, people and animals, edible and non-edible, friend and foe, and so on. Eventually our system of classifications becomes immense and interconnected, partitioning up the world of blooming buzzing confusion into a million tiny but intelligible pieces.
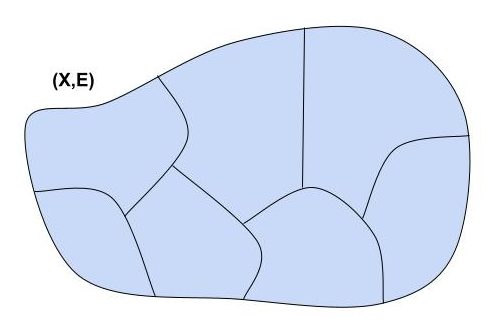
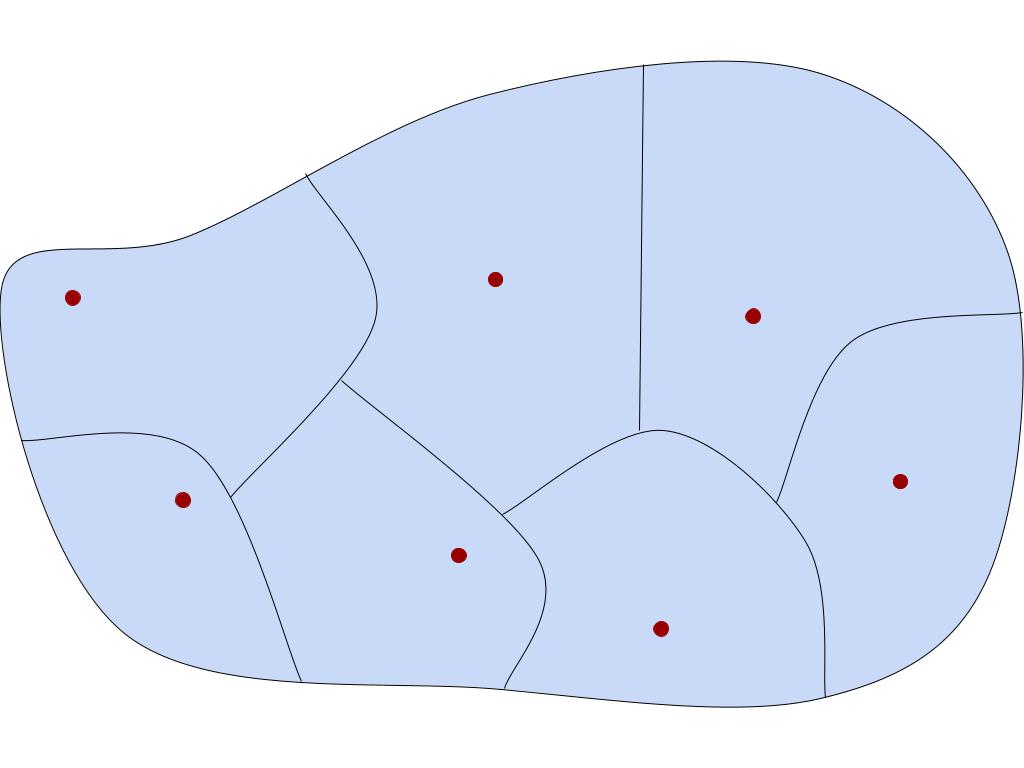
In the real world, classification is often vague. In math, it can be made a bit more precise through the notion of an equivalence relation. An equivalence relation can be thought of in two ways. First, concretely, it’s a way to “carve up” a set, partitioning it into disjoint pieces called equivalence classes. Every element x of the original set appears in exactly one equivalence class, which is referred to as [x].
More abstractly, an equivalence relation on a set X is a binary relation E on X satisfying three axioms:
Reflexivity: (∀x ∈ X) (x E x)
Symmetry: (∀x,y ∈ X) (x E y ⇒ y E x)
Transitivity: (∀x,y,z ∈ X) (x E y E z ⇒ x E z)
One can prove that any binary relation satisfying these three axioms yields a carving-up of X in the sense described above.
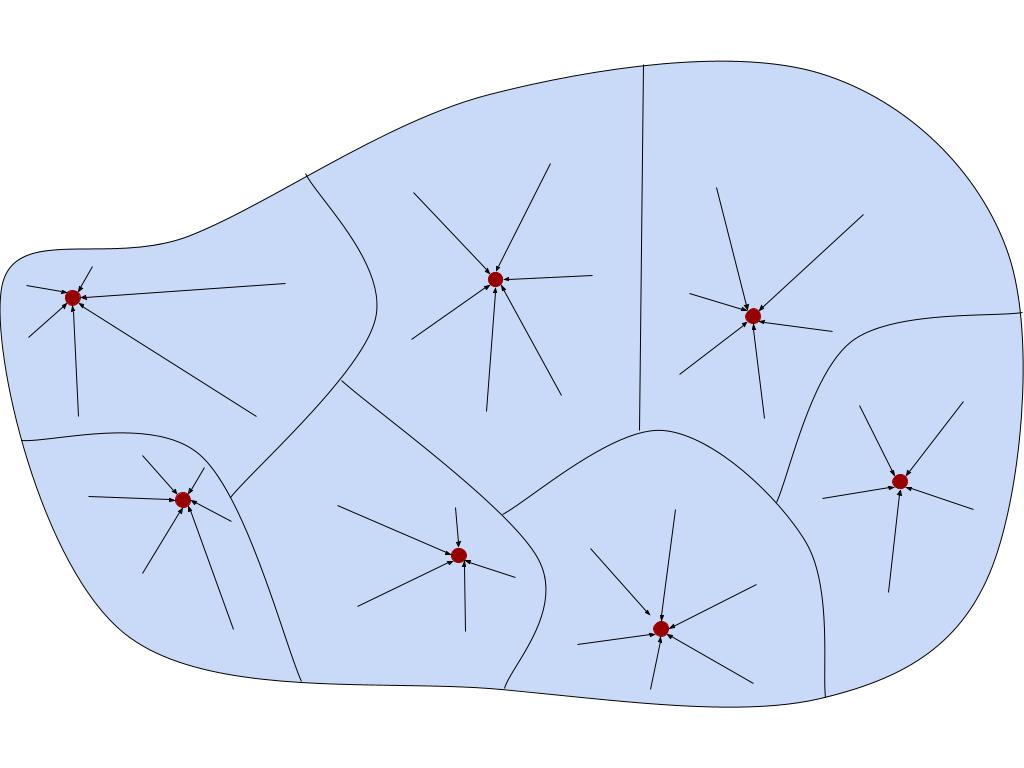
One thing that classification systems allow you to do is to coarse-grain the world, forgetting about the finer details and remembering only higher-order properties. Rather than think about my dog in particular, I can think about the class of all dogs, and treat this class as an object in its own right. Mathematically, this is called quotienting.
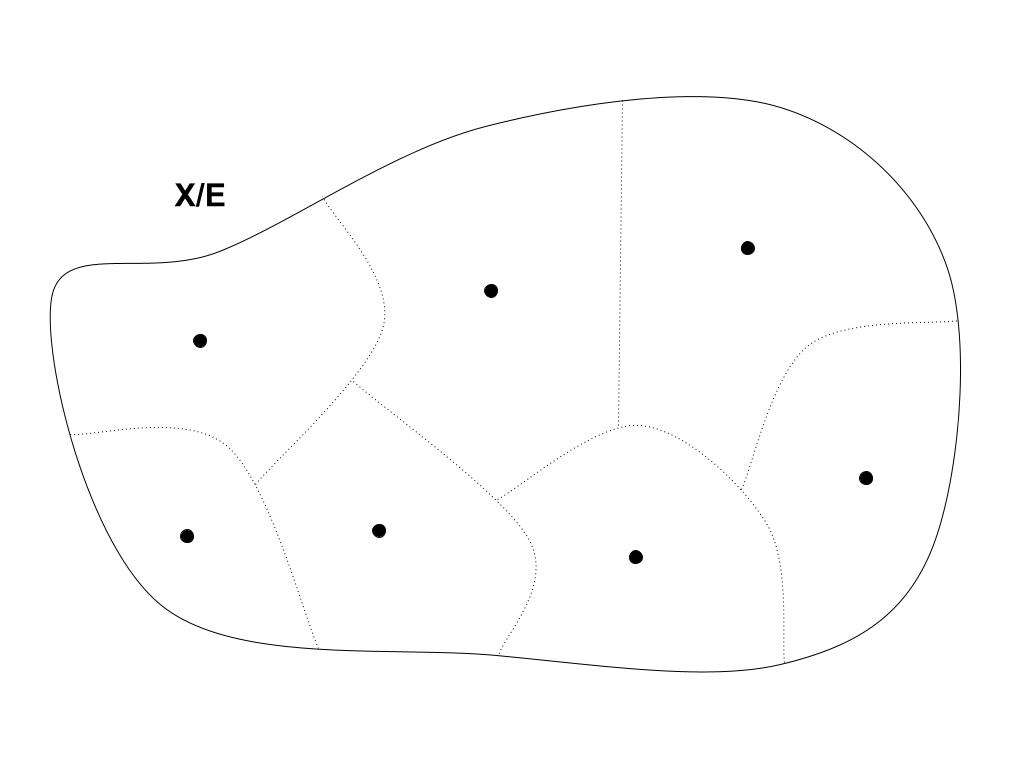
Quotienting is a very common mathematical move that appears wherever there are equivalence relations around. If E is an equivalence relation on a set X, then the quotient of X by E (written X/E) is just the set of all the equivalence classes.
X/E = { [x] | x ∈ X }
Quotienting can change structures in interesting and complicated ways. One of the most common examples is ℤn (the integers mod n), which we get by quotienting the integers ℤ by the “differs-by-n” equivalence relation:
x ~ y ⇔ |x – y| = n
For instance, in ℤ5, the number 2 is identified with the equivalence class [2] = {…, -8, -3, 2, 7, 12, …}.
Equally common, the real numbers are often defined by quotienting. You start with the set of all Cauchy sequences of rational numbers, and consider the equivalence relation of “converging to one another” between sequences:
x ~ y ⇔ limn→∞ |xn – yn| = 0
A real number is defined to be an equivalence class of such sequences. This is a good example of coarse-graining in practice. You never really think of real numbers as sets of Cauchy sequences of rationals (outside of an analysis course). Once you quotient out by this equivalence relation, you forget about this “internal structure” and treat each real number as a primitive object. Similarly, in ℤ5 you think of 2 as a primitive element, not an infinite set of integers.
Some classifications are harder than others
Let’s quickly recap the discussion in the last post.
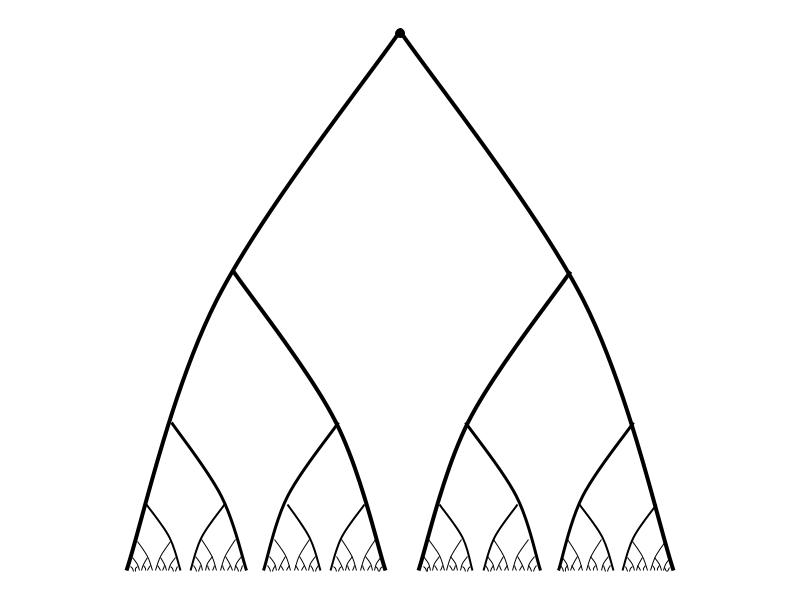
We began with an infinite group of prisoners whose freedom rested on their ability to pick representatives from a particular equivalence relation on Cantor space, 2ℕ. Cantor space can be thought of in many ways. In our case, it’s the space of all ways of assigning black and white hats to the lineup. It’s also the space of all infinite binary sequences, or equivalently all functions from ℕ to {0,1}. And it can be visualized as the infinite paths through the complete infinite binary tree.
The equivalence relation the prisoners found themselves stuck with was the “eventually agrees” relation, E0, defined by:
x E0 y ⇔ (∃n ∈ ℕ) (∀m > n) (xm = ym)
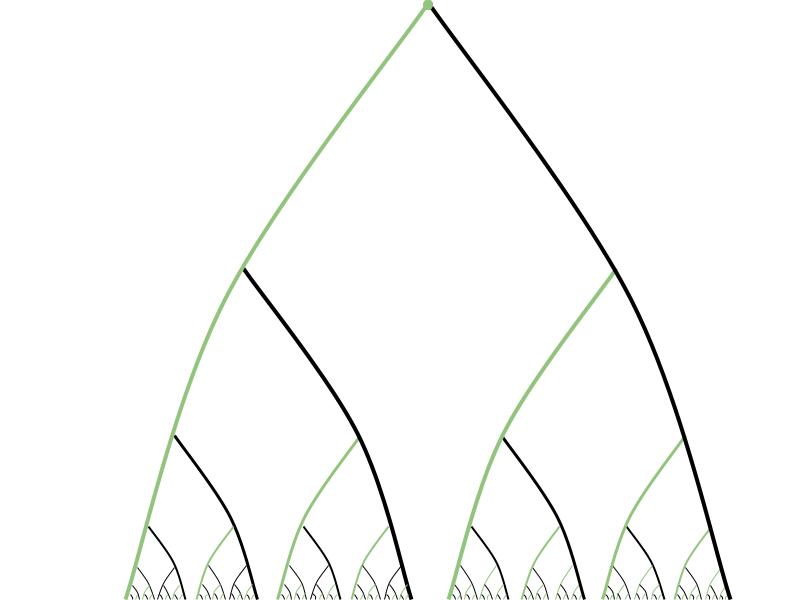
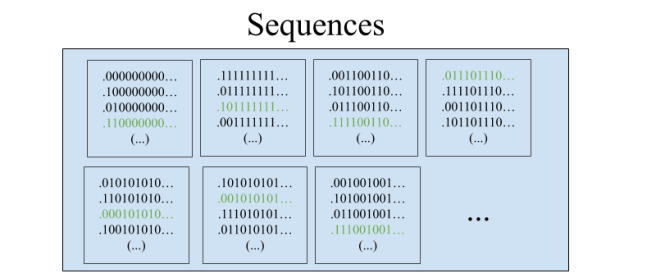
For instance, here’s what the equivalence class of the all-zeros sequence 000… looks like:
The prisoners had to find some way of agreeing on a choice of representative from each equivalence class. There’s actually a few different ways to formalize this idea: transversals, selectors, and reductions.
A transversal of an equivalence relation E on X is a subset A ⊆ X which intersects each E-class exactly once.
(∀C ∈ X/E) (|A ∩ C| = 1)
A selector for an equivalence relation E on X is a function f: X → X which takes the elements of an equivalence class C to the representative element for C.
And finally (and most importantly) there’s the idea of a reduction. This idea is significantly more general than the previous two, and will play a big role in the upcoming posts. First, the formal definition:
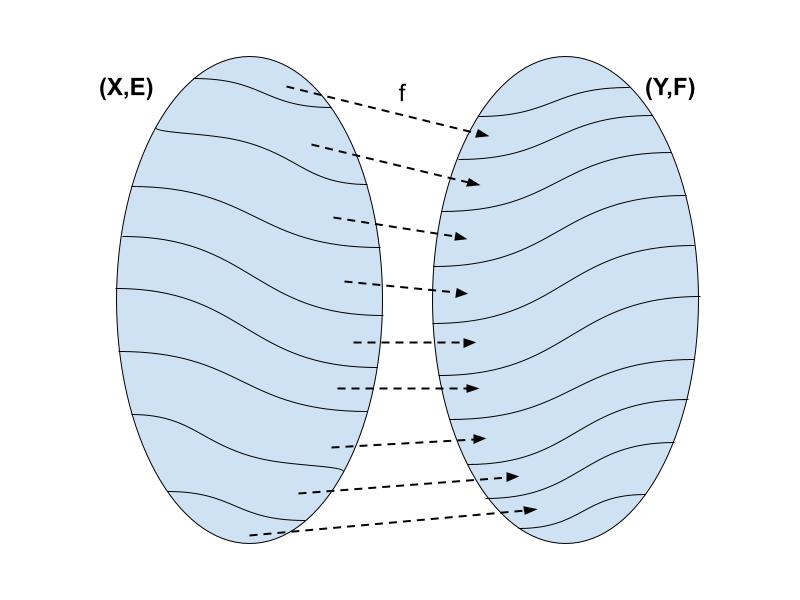
Given two sets X,Y and equivalence relations E (on X) and F (on Y), a reduction of E to F is a function f: X → Y such that (∀x, x’ ∈ X) (x E x’ ⟺ f(x) F f(x’))
If such a function exists, we say that E is reducible to F and write E ≤ F.
Informally, reducibility measures the relative complexity of equivalence relations. If E ≤ F, then E is “simpler” or “easier. to compute” than F. For instance, if we want to check if two elements x and x’ are E-related, we can instead check if f(x) and f(x’) are F-related. Thus if we had an oracle for F then we could figure out E (using f).
A special case of reduction is where F is just the identity relation =Y on Y, in which case we have:
xEx’ if and only if f(x) = f(x’)
Now, if we’re allowed to use any function f whatsoever, then this notion of reducibility ends up not being not so interesting. For instance, we can reduce any equivalence relation to equality by choosing Y = X/E and defining f(x) = [x]E. More generally, reducibility with arbitrary functions turns out to just be a matter of comparing the cardinalities of the quotients. Thus we shift our focus from arbitrary functions to definable functions, in the sense of Borel.
In the last post we talked about Borel subsets of a space, not functions. But a function can be identified with its graph and treated as a subset of X × Y. So f: X → Y is Borel if and only if it is Borel as a subset of X × Y. Borel relations are defined similarly.
(Reminder: the Borel sets in a topological space X are just the sets you can construct out of open sets through countable unions, intersections, and complements. Equivalently, they’re the sets definable in countable propositional logic, with atomic propositions interpreted as defining the basic open sets.)
(Notice that we’re taking advantage of the relationship between definability and topology: if X and Y are both topological spaces, then the product X × Y already has a canonical “product topology”, generated by products of open sets in X and Y. So once we know how to interpret the atomic propositions in X and in Y, we can automatically interpret atomic propositions in X × Y.)
We’ve finally arrived at the central concept: Borel reducibility or definable reducibility.
Given two topological spaces X,Y and equivalence relations E (on X) and F (on Y), a Borel reduction of E to F is a Borel function f: X → Y such that (∀x, x’ ∈ X) (x E x’ ⟺ f(x) F f(x’))
If such a function exists, we say that E is Borel reducible to F and write E ≤B F.
Classifying classifications
Let me now get to the punchline.
We carve up the mathematical universe by defining equivalence relations on the sets we’re interested in. When these sets are topological spaces, we can compare these equivalence relations through the relationship of Borel reducibility. At the end of the last post, I told you that there was no Borel transversal of E0. By the same token, there is no Borel reduction of E0 to the identity relation on Cantor space. “Eventual equality” is a strictly more complicated notion than “equality”.
This might not sound very surprising. Of course eventual equality is more complicated than equality, it has an extra word in its name! But it turns out that lots of complicated-looking equivalence relations are Borel reducible to the equality relation. Such equivalence relations are called smooth or concretely classifiable. For example, the relationship of “similarity” between square matrices (intuitively, two matrices are similar if they represent the same linear transformation but in different bases) turns out to be smooth.
E is smooth if and only if there’s a Borel reduction E ≤B =ℝ
(Notice that I defined it here in terms of identity on ℝ rather than 2ℕ. Not all identity relations are of equal complexity, but these two are. We’ll see that for many purposes ℝ and 2ℕ are interchangeable.)
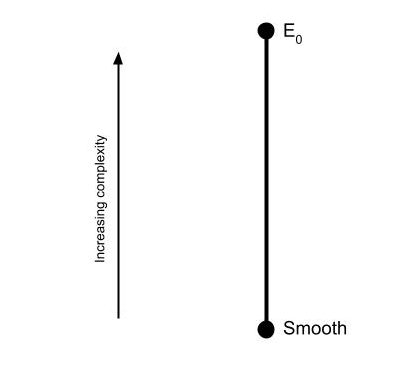
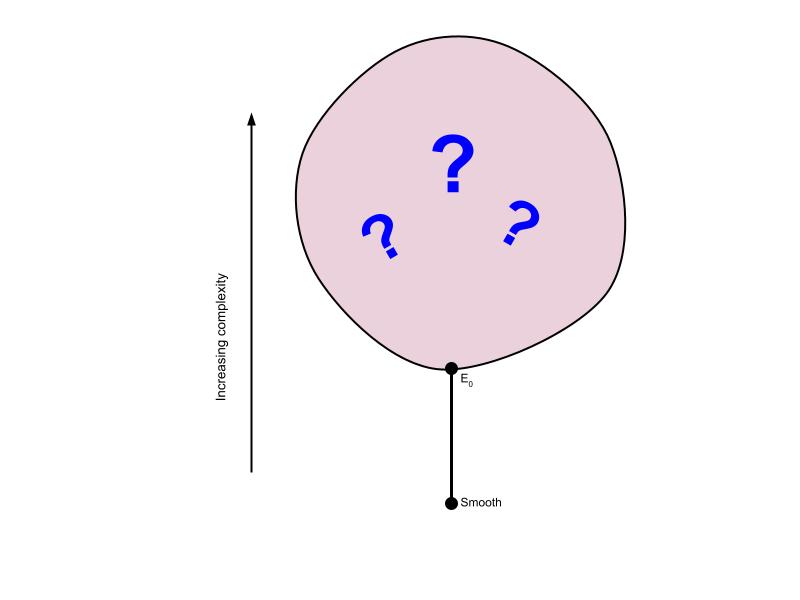
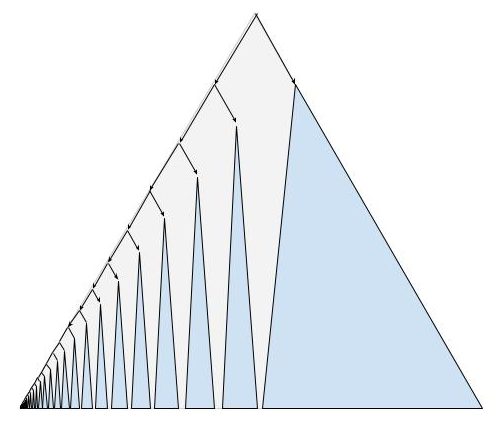
The smooth equivalence relations are the simplest ones out there. If E is smooth, then there’s some definable way to assign a different real number to each class. We can begin to draw a picture of the Borel reducibility hierarchy:
Natural questions immediately arise. Are there any equivalence relations strictly between smooth and E0? (No.) Are there equivalence relations above E0? (Yes, many.) Is there a most complex equivalence relation? (No, for any equivalence relation there’s a strictly harder one.) Are there equivalence relations of incomparable complexity? (Yes, in fact there’s uncountably many such equivalence relations!)
The Borel reducibility hierarchy for equivalence relations is a relatively recent discovery in the history of mathematics. It’s only about twenty years old. As such, there are many open questions about its structure. For instance, at the time of writing it’s unknown whether there’s exactly one class directly above E0. There could be multiple incomparable classes directly above E0, or it could be that for any equivalence relation E above E0, there’s another one strictly in between E0 and E.
The big balloon represents the unknown territory waiting to be explored. But one thing that is clear at this point is that the internal structure of this balloon is very rich. In upcoming posts I hope to describe some of what we do know about it, and describe some recent attempts to probe its structure using techniques in model theory and infinitary first-order logic.
Infinitely many prisoners are assembled in a line as pictured. Each knows their place in the line. Each wears either a black or white hat, and each can only see the hats in front of them. Starting from the back of the line, each prisoner has to guess the color of their own hat. The prisoners were allowed to coordinate before the hats were assigned, but now no communication is allowed. Even the guesses must be silently submitted.
If only finitely many prisoners guess wrong, then everybody goes free. Can they succeed?
(Pause for thought.)
Amazingly, yes! Here’s the strategy:
Label white hats as 1 and black as 0. Then an assignment of hats becomes an infinite binary sequence, i.e. an element of 2ℕ. Define an equivalence relation called E0 on 2ℕ as follows:
x E0 y if and only if (∃n ∈ ℕ) (∀m > n) (xm = ym) “x and y eventually agree”
When the prisoners meet up beforehand, they coordinate by agreeing on a choice of one representative from each class.
Once they’re in the room, every prisoner can see all but a finite number of hats. So they all know exactly which equivalence class they’re in. Now each prisoner guesses as if they were in the representative sequence from this class. Since the actual sequence and the representative sequence eventually agree, the prisoners’ guesses eventually agree with reality, and so they go free!
Making choices is hard
I talked about this puzzle a few years ago in this post. Several commenters balked at the solution and said something like: “but there are uncountably many equivalence classes, so therefore the prisoners need to be able to coordinate on uncountably many representatives. Surely this is unreasonable!”
I think that uncountably many representatives is not what’s at issue here. Consider the equivalence relation on the reals defined by:
x ~ℤ y if and only if x – y ∈ ℤ.
Here we also have uncountably many equivalence classes, but the prisoners could easily come to an agreement on which representative to pick. They could for instance agree to choose the unique representative which lies in the interval [0,1). Here the prisoners are able to coordinate on uncountably many representatives, simply by agreeing on a function (f(x) = x mod 1) which takes each real to the representative for its class. A function f like this is called a reduction of ~ℤ to =ℝ, as it converts the problem of deciding x ~ℤ y into the problem of deciding if two real numbers are equal (in particular, f(x) =ℝ f(y)).
Now, is there a function f from 2ℕ to 2ℕ that takes an infinite binary sequence to the representative sequence for its class? That is, is there a reduction of E0 to the identity relation on 2ℕ? Sure! Each E0-class C is non-empty, so we can “make a choice” of any element γC ∈ C. Then set f(x) = γ[x], where [x] denotes the equivalence class of x.
I highlighted the key phrase in the above definition: make a choice. I said that we could choose an element from each class, but didn’t tell you how. And this is a problem for the prisoners! For them to all agree on the function’s values, they must be able to communicate how this choice is made to each other.
In the case of the equivalence relation ~ℤ, we were able to find a precise recipe for choosing representatives, namely the definition of the function (x ↦ x mod 1). But can the prisoners find a precise recipe for choosing representatives for the E0-classes?
That is, is there a definable function that reduces E0 to =ℝ? Well, what exactly is definability?
What is definability?
A major theme of descriptive set theory is the following identification, which I’d like to try to motivate:
DEFINABLE = BOREL
A definition is a syntactic thing. It’s a sentence with a free variable, like “x is the 15th digit in the decimal expansion of π” or “f is the identity function on ℝ”. To precisely state what definability is, we must specify a formal language to work in. The simplest logical language is that given by propositional logic. Here we begin with an alphabet, a countable set of basic atomic propositions, and build all other sentences through finite conjunctions, disjunctions, and negation.
Returning to our puzzle, we were interested in describing 2ℕ and its subsets. We want our atomic propositions to represent easily definable subsets of 2ℕ, or equivalently, simple properties of infinite binary sequences. A natural choice for these basic atomic properties is Pnm = “x’s nth bit is m”, interpreted as defining the set {x ∈ 2ℕ | x’s nth bit is m}. Translated back to prisoners and hats, these are sentences like “Prisoner 35 is wearing a black hat” or “Prisoner 15 is wearing a white hat”. Intuitively, everything that can be said about infinite binary sequences, should be in principle expressible just in terms of sentences like these.
With finite conjunctions, disjunctions, and negation, we can define sets like {x ∈ 2ℕ | x starts with 010110} and {x ∈ 2ℕ | x’s first two bits agree}. Identifying 0 with “left” and 1 with “right”, we can draw these sets as subsets of the infinite binary tree:
x starts with 010110
x’s first two bits agree
How about a set like {x ∈ 2ℕ | x contains at least one 1}?
x contains at least one 1
What we want is a proposition like “x’s first bit is 0 or x’s second bit is 0 or …”, i.e.
(P00 ∨ P10 ∨ P20 ∨ …), or \/n∈ℕ Pn,0
What we need is the ability to take countably infinite conjunctions and disjunctions. Ordinary propositional logic doesn’t allow this. So we graduate to countable propositional logic. In other words, we expand the syntax by closing it under countable conjunctions and disjunctions:
For any countable collection of sentences {φn | n ∈ ℕ}, /\n φn and \/n φn are also sentences
On the semantic side, our collection of definable sets is now closed under countable unions, intersections, and negations. For the measure theorist, this is a familiar object: we’ve just defined a sigma-algebra!
(Technical note: when we say “closed under countable unions and intersections”, we also include empty unions and intersections, which correspond to ∅ and X, respectively. For notational convenience, we introduce the symbols ⊥ and ⊤ into our syntax, thought of as the atomic propositions “False” and “True”.)
In general there are many different sigma algebras you can put on a set, corresponding to different choices of the atomic propositions. But when our set is also a topological space, as in ℝ and 2ℕ, there’s a natural choice of sigma-algebra, called the Borel sigma-algebra. Here we take our atomic propositions to define the basic (or sub-basic) open sets. Then the Borel sets are all the sets constructible through countable unions and intersections from basic opens, or equivalently, the sets definable in countable propositional logic.
In 2ℕ the topology is generated by sets of the form
{x ∈ 2ℕ | x’s nth bit is m} for any n, m ∈ ℕ,
which are the same as our earlier Pmn.
How about in ℝ? Here the topology is generated by basic sets of the form
(a,b) = {x ∈ ℝ | a < x < b} for any a, b ∈ ℚ
So we choose our atomic propositions accordingly: for any two rationals a,b, we have an atomic proposition Pab, which we interpret as “a < x < b”.
Let’s pause to recall how we got here. We began by trying to define “definability”, and have found that there’s a natural way to interpret countable propositional logic through Borel sigma algebras on topological spaces. We have an atomic proposition for each (sub-)basic open set, and every set is defined by some countable propositional sentence. As we vary our interpretation of the atomic propositions, we move between different topological spaces.
The question “can the prisoners coordinate on a strategy?” has now taken on a definite form: “is there a Borel subset of 2ℕ that picks exactly one element from each equivalence class?” And it turns out that the answer is no! For the prisoners to coordinate on a choice function, they need more syntactic resources at hand than countable propositional logic.
Credit to Joel David Hamkins, who I heard discussing this paradox on an episode of the podcast My Favorite Theorem.
Define a finite game to be any two-player turn-based game such that every possible playthrough ends after finitely many turns. For example, tic-tac-toe is a finite game because every game ends in at most nine turns.. So is chess with the 50-move-rule enforced (if 50 moves are taken without any pawn advances or captures, then the game ends in a draw). In both these examples, there’s an upper bound to how long the game can last, but this is not required. A game of transfinite Nim would count as finite; every game lasts for only finitely many turns, even though there is no upper bound on the number of turns it takes.
Now, consider the game Hypergame. To play Hypergame, Player 1 begins by choosing any finite game G. Then Player 2 plays the first move of G, Player 1 plays the second move of G, and so on until the game is completed. (Since Player 1 chose a finite game, this will always happen after some finite amount of time.)
Is Hypergame a finite game? Yes, we can easily see that it must be. Whatever game Player 1 chooses will be over after n steps, for some finite n. So that playthrough of Hypergame will have taken n+1 steps.
But if Hypergame is a finite game, then it is a valid choice for the first move of Hypergame! So we can now imagine the following playthrough of Hypergame:
A Troubling Playthrough of Hypergame Player 1: For the finite game that we shall play, I pick Hypergame. Player 2: Hm, okay. So now I’m playing the first move of Hypergame. So I must now choose any finite game. I’ll choose Hypergame! Player 1: Alright so I’m again playing the first move of this new game of Hypergame. I’ll choose Hypergame again. Player 2: And I choose Hypergame again as well. So on forever…
At no point does either player violate the rules of Hypergame. And yet, we ended up with an infinite playthrough of Hypergame, which we proved was impossible! So we have a contradiction. What is the resolution?
✵✵✵
Here’s one possible resolution, analogous to the resolutions of similar set-theoretic paradoxes.
We can think about a game as a directed rooted tree. The vertices of the tree correspond to game states, and the edges correspond to the allowed moves. The root of the tree corresponds to the starting game state, and Player 1 gets to choose which edge to travel along first. From the new vertex, Player 2 decides the next edge to travel along. And so on. The tree’s leaves correspond to ending states of the game, and each leaf is labelled according to which player won in that ending state.
In this framework, what is a finite game? As I defined it above, a finite game is just any directed rooted tree such that every path starting at the root ends at a leaf after passing through finitely many edges. This corresponds perfectly to the idea that every possible playthrough of the game takes only finitely many turns. Notice that a finite game is not necessarily a finite tree! The game tree of a finite game is only finite if it’s also finitely branching. In other words, for a game to have a finite tree requires not just that every playthrough is finitely long, but that each player always has only finitely many choices on their turn.
For instance, the game tree of Hypergame is not a finite tree, because Player 1 has infinitely many possible finite games to choose from on his first turn. How big exactly is the game tree of Hypergame? We know that we have to have a vertex corresponding to the start of any finite game, so it must be at least as large as the set of all finite games. But how large is this set?
This is where we run into problems. The game tree of a finite game can be arbitrarily large. Consider the game which starts by Player 1 choosing any real number and then immediately losing. The height of the game tree is 1, but its width is the cardinality of the continuum. Similarly for any set X we can find a game whose tree has cardinality |X|. This means that there are finite games of arbitrary cardinalities. But then as a corollary to the nonexistence of a largest cardinality, we know that there is no set of all finite games! And this implies that Hypergame has no game tree! More precisely, there is no set corresponding to the game tree of Hypergame as we defined it.
Couldn’t we instead think about Hypergame as a proper class? Sure! But then when we choose a finite game in our first move, we couldn’t be picking Hypergame, as the property “is a finite game” would only apply to sets and not proper classes. This means that we can’t actually select Hypergame as our first move! And so we avoid the paradoxical conclusion that we can keep picking Hypergame ad infinitum.
I find it quite fascinating that the seemingly innocent notion of a finite game can lead us into paradoxes involving proper classes!
Recently I told a friend that I thought ZFC was one of humankind’s greatest inventions. He pointed out that it was pretty bold to claim this about something that most of mankind has never heard of, which I thought was a fair objection. After thinking for a bit, I reflected that the sense of greatness I meant wasn’t really consequentialist, and thus it was independent of how many people know what ZFC is, or even how many people’s lives are affected in any way by it. Instead I intended greatness in a sort of aesthetic and intellectual sense.
The closest analogy to ZFC outside of math is the idea of a “theory of everything” for physics. If we found a theory of everything for physics, it’d likely have a bunch of important practical consequences, and that’d be part of what makes it a great invention. But it would also be a great invention in an intellectual sense, as a discovery of something fundamental and unifying of many seemingly disparate phenomena we observe. This is what ZFC is like: a mathematical theory of everything. One reason this analogy is imperfect is that due to the incompleteness theorems, we know that there can be no “theory of everything” for mathematics. (Any theory of everything will have at least one thing it can’t prove, namely its own consistency.) So ZFC’s greatness can’t come from being a perfect theory of everything, because we know that it is not. Nonetheless, ZFC serves as a foundation for virtually all known mathematics, and this is what I think is so incredible about it.
What does it mean for something to “serve as a foundation” for math? ZFC is a foundation in (at least) three ways: (1) in terms of its ability to define virtually all mathematical concepts, (2) in terms of its structures being rich enough to contain objects that come from virtually all fields of math, and (3) in terms of being an axiom system that suffices to prove virtually every result in known mathematics.
Syntax
Virtually every mathematical concept you can think of has a definition in the language of ZFC. For example, we have definitions for numbers like “π” and “√2”, sets like ℕ and ℝ, algebraic objects like the group S5 and the ring ℚ[x], geometric objects like Platonic solids and differential manifolds, computational objects like Turing machines and cellular automata, and even logical entities like models of first order theories and proofs within formal systems. What makes this especially impressive is the simplicity of the language: it uses nothing besides the basic symbols of first order logic and one binary relation symbol: ∈. So one thing that ZFC teaches us is that virtually every concept in mathematics can be defined just in terms of the set membership relation, and all mathematics can be understood as exploring the properties of this relation.
Semantics
Models of ZFC are insanely richly structured. You can navigate within them to find sets corresponding to every object that mathematicians study. π has a representative set within any model of ZFC, as does the Monster group or the torus. These representative sets are not always perfect: there are models of ZFC where ℝ is countable, for instance. But within the model, they nonetheless share enough similarities with the original objects that virtually everything you can prove about the original object, remains true of the ZFC-representative.
Proof
Finally, ZFC is a computable set of sentences, and we may inquire about what can be proven from it. Keeping up the ambition of the previous two sections, we might want to claim that all mathematical truths can be proven from ZFC. But due to the limitations of first order logic discovered over the last century, we now know that this goal is not achievable. The set of all first order truths of arithmetic is not computable, and so there must be some such truths that aren’t logical consequences of ZFC. Nonetheless, it is commonly claimed that virtually all mathematical truths can be derived from ZFC using the usual proof system for first order logic.
This is especially remarkable given the simplicity of ZFC. I believe that the intuitive content of each axiom could be explained to a smart middle schooler. Additionally, these axioms are extremely intuitively appealing. the most controversial of them has been choice, which is equivalent to the statement that the Cartesian product of non-empty sets is also non-empty. Second most controversial is probably the axiom of infinity, which just says that there’s an infinite set. The rest are even less hard to accept than these.
Now, the fact that you can prove virtually everything from ZFC doesn’t mean that you should. So don’t interpret me as saying that ZFC is of practical use to the daily work of mathematicians trying to prove things outside of set theory and logic. Again, an analogy to physics: we might discover a theory of everything that we know reproduces all the known phenomena of GR and QM, but find that it’s so hard to prove things that we are practically never better off using this theory to calculate things. Nonetheless, ZFC as a theory of everything teaches us that most of math can be understood as conceptually quite simple: the logical consequences of a fairly simple and computable set of sentences about sets. People make a big deal out of Euclid’s axiomatization of geometry, but this is a small feat relative to the axiomatization of all of mathematics.
Metamath
And not only can ZFC prove virtually everything in ordinary mathematics, but ZFC can prove much of what we know in metamathematics and logic itself. When logicians are studying model theory, or even when set theorists are studying ZFC, they are almost always working with ZFC as their meta-theory, meaning that they are making sure that all of their proofs could ultimately be expanded out as ZFC proofs. So the big results of logic, like the completeness theorem, the compactness theorem, the incompleteness theorems, the Löwenheim-Skolem theorems, are all theorems of ZFC.
The fact that ZFC can even talk about these model theoretic notions means that models of ZFC are able to talk about models of ZFC, which is where things get very meta. One can prove that every model of ZFC – every one of these crazily richly-structured universes containing virtually all of mathematics – contains another such model of ZFC. This follows from the reflection theorem, which again can be proven in ZFC!
Hopefully I have now roused enough interest in you to get you to take a look at some of the actual mathematics. You might be curious to know what exactly this theory is. And you’re in luck, it’s simple enough that I can write the whole theory in just nine lines!
Note that with the exception of the final axiom, Choice, the only symbols I’ve used are logical symbols and ∈. I used shorthand for Choice for the sake of readability, but this could be expanded out just like the others. I’m also using a convention where any free variables are considered to be universally quantified over, which shortens things further.
I’ll close with a one-sentence description for each axiom.
Extensionality: No two distinct sets have all the same elements. Pairing: For any two sets, there’s a set containing just those two. Union: The union of any set of sets exists. Powerset: There is a set of all subsets of any set. Specification: For any property Φ and any set x, you can form a set out of just those elements of x with that property. Replacement: For any definable function and any set, the image of that set under the function exists. Infinity: There’s an infinite set. Regularity: Every non-empty set has a member that it shares nothing with. Choice: For any set of nonempty sets, there is a function that picks out one element from each.
The fact that you can prove everything from the infinitude of primes to Fermat’s Last Theorem from just these basic principles, is really quite mind-blowing.
I want to describe a hierarchy of infinitary logics, and show some properties of one of these logics in particular.
First, a speedy review of first order logic. In the language of first order logic we have access to parentheses {(, )}, the propositional connectives {∧, ∨, ¬, →}, the equals sign {=}, quantifiers {∀, ∃}, and a countably infinite store of variables for quantification over {x1, x2, x3, …}. These are the logical symbols common to any first-order language, but to complete the language we additionally specify a set of constant symbols {c1, c2, c3, …}, function symbols {f1, f2, f3, …}, and relation symbols {R1, R2, R3, …}. These sets can be any cardinality whatsoever. We can then define the set of grammatical sentences (“well-formed formulas”) of this language. We also interpret these symbols in a fairly straightforward way: a first-order structure has a universe of objects, and constants are assigned referents within that universe, function symbols are assigned n-ary functions on the universe, and relation symbols are assigned n-ary relations on the universe.
One consequence of the construction is that all of our sentences are finite, which puts an important cap on expressive power. Consider a language of arithmetic with constants for every natural number: {0, 1, 2, 3, …}. We might naturally want to say that the set of constants exhausts all the objects in our universe. But this takes an infinitely long sentence: ∀x (x=0 ∨ x=1 ∨ x=2 ∨ x=3 ∨ …). You might think you could be clever and find a finite expression of this idea, but it turns out that you can’t. (This is a consequence of Gödel’s first incompleteness theorem.)
So a natural extension of first-order-logic is to allow infinitely long sentences. For any two cardinal numbers α and β, define Lα,β to be first-order logic, but with conjunctions of any length < α allowed and blocks of quantifiers of any length < β. (Note that infinite conjunctions implies infinite disjunctions as well.) For example, Lω,ω is ordinary first-order logic: conjunctions and quantifier blocks of any finite length. Lω1,ω is first-order logic plus countably infinite conjunctions, but only finite quantifiers. Lω,ω1 has finite conjunctions but countably infinite quantifiers. Question: what logic is this equivalent to?
Notice that countably infinitely many quantifiers use countably infinitely many variables, but if you only have finite conjunctions you can only use finitely many of them. So this ends up being equivalent to Lω,ω. For this same reason, if β > α then Lα,β is no different from Lα,α.
Lω1,ω is especially interesting to logicians, because it’s significantly stronger than first-order logic, but not so much stronger as to lose all nice proof-theoretic properties. In particular, there’s a sound and complete proof system for Lω1,ω! It’s also quite simple: just the FOL proof system plus one new axiom and one infinitary deduction rule:
New axiom For any m ∈ ω and any set of sentences {φn | n ∈ ω}, ∧n∈ω φn → φm
New inference rule φ0, φ1, φ2, … ⊢ ∧n∈ω φn
If we allow deductions of any countably infinite (successor) ordinal type, then we get a sound and complete proof system. This means that for any countable set of Lω1,ω-sentences Σ and any Lω1,ω-sentence φ, you can deduce φ from Σ just in case Σ actually (ω1,ω)-logically implies φ.
Infinite conjunctions give you a massive boost in expressive power going from FOL to Lω1,ω. You can categorically define the natural numbers: Take Peano arithmetic and add to it the axiom: ∀x ∨n∈ω (x = n). See why this works? We’ll refer back to this theory as PA*.
So Lω1,ω is powerful enough to be able to categorically define the natural numbers. We might wonder if we can also categorically define all other countable structures. It turns out that while we can’t do that, we can do something slightly weaker. For any countable structure, there’s a single Lω1,ω-sentence that defines it up to isomorphism among countable structures. The complexity of this sentence is a way of measuring the complexity of the structure, and has close connections to other measures of structure complexity. (The key word to learn more about this is Scott rank.)
What else can you do with Lω1,ω? Here’s something really cool: Tarski’s theorem on the undefinability of truth tells us that in first-order logic you cannot define a truth predicate. But in Lω1,ω, you can! Take a countable first-order language L. Add on the language of arithmetic (0, S, +, ×, ≤) to L. L is still countable, so enumerate all its sentences {φ1, φ2, φ3, …}. Now, the sentence Tr(x) := ∨n∈ω (x=n & φn) is a truth predicate: for any n, if φn is true then Tr(n) is true and if φn is false then Tr(n) is false.
You can express the idea that “infinitely many things satisfy φ(x)” with the following sentence:
The first line says “there’s at least two things satisfying φ”, the second says “there’s at least three things satisfying φ”, and so on forever.
Finally, unlike FOL, Lω1,ω is not compact. This means that there are sets of sentences without models, where every finite subset has a model. But it’s actually even worse than that! Lω1,ω is strongly non-compact. You can have an unsatisfiable set of sentences, every countable subset of which has a model! Once again, this pretty remarkable fact has a simple proof:
Take the language of Peano arithmetic and add on ℵ1-many constant symbols: {cα | α < ω1}. Now add to PA* the set of sentences {cα ≠ cβ | α ≠ β, both in ω1}. Let’s call this theory Σ. Every countable subset of Σ has a model, but Σ itself doesn’t. You can always take countably many constant symbols and assign them distinct referents in ℕ such that some natural numbers are left out. However, you can’t assign uncountably many distinct referents in ℕ while still leaving out some natural numbers, by a simple cardinality argument.
There’s an interesting twist here: Consider the set of sentences {cα ≠ cβ | α ≠ β, both < ω1CK} ⊂ Σ, where ω1CK is the Church-Kleene ordinal, the smallest uncomputable ordinal. ω1CK is countable, so this is a countable set of sentences. This set of sentences has a model, but to obtain it you must choose a bijection from the set of constants {cα | α < ω1CK} to the natural numbers. By the definition of ω1CK, this bijection is uncomputable! There are uncountably many countable ordinals above ω1CK (there are countably many computable ordinals, and uncountably many countable ordinals), so while every countable subset of Σ has a model, uncountably many of these models will be uncomputable!
Now the pieces are all in place to start applying forcing to prove some big results. Everything that follows assumes the existence of a countable transitive model M of ZFC.
First, a few notes on terminology.
The language of ZFC is very minimalistic. All it has on top of the first-order-logic connectives is a single binary relation symbol ∈. Nonetheless, people will usually talk about theorems of ZFC as if it has a much more elaborate syntax, involving symbols like ∅ and ω and ℵ1 and terms like “bijection” and “ordinal”. For instance, the Continuum Hypothesis can be written as “There’s a bijection between 𝒫(ω) and ℵ1“, which is obviously using much more than just ∈. But these terms are all simply shorthand for complicated phrases in the primitive language of ZFC: for instance a sentence “φ(∅)” involving ∅ could be translated as “∃x (∀y ¬(y ∈ x) ∧ φ(x))”, or in other words “there’s some set x that is empty and φ(x) is true”.
Something interesting goes on when considering symbols like ∅ and ω and ℵ1 that act like proper names. Each name picks out a unique set, but for some of these names, the set that gets picked out differs in different models of ZFC. For example, the interpretation of the name “ℵ1” is model-relative; it’s meant to be the first uncountable cardinal, but there are countable models of ZFC in which it’s actually only countably large! If this makes your head spin, it did the same for Skolem: you can find more reading here.
On the other hand, the name “∅” always picks out the same set. In every model of ZFC, ∅ is the unique set that contains nothing at all. When a name’s interpretation isn’t model-relative, it’s called absolute. Examples include “∅” and “1,729”. When a name isn’t absolute, then we need to take care to distinguish between the name itself as a syntactic object, and the set which it refers to in a particular model of ZFC. So we’ll write “ℵ1” when referring to the syntactic description of the first uncountable cardinal, and ℵ1M when referring to the actual set that is picked out by this description in the model M.
With that said, let’s talk about a few names that we’ll be using throughout this post:
In M, ω is the conventional name for the set that matches the description “the intersection of all inductive sets”, where inductive sets are those that contain the ordinal 0 and are closed under successor. In any transitive model of ZFC like M, ω is exactly ℕ, the set of natural numbers. Since we’re restricting ourselves to only considering transitive models, we can treat ω as if it’s unambiguous; its interpretation won’t actually vary across the models we’re interested in.
ω1 corresponds to the description “the smallest uncountable ordinal”. This description happens to perfectly coincide with the description “the first uncountable cardinal” in ZFC, which has the name ℵ1. But unlike with ω, different transitive models pick out different sets for ω1 and ℵ1. So in a model M, we’ll write ω1M for the set that M believes to be the smallest uncountable ordinal and ℵ1M for the first uncountable cardinal.
ω2 is the name for the first ordinal for which there’s no injection into ω1 (i.e. the first ordinal that’s larger than ω1). Again, this is not absolute: ω2M depends on M (although again, ω2M is the same as ℵ2M no matter what M is). And in a countable model like those we’ll be working with, ω2M is countable. This will turn out to be very important!
𝒫(ω) is the name for the the set that matches the description “the set of all subsets of ω”. Perhaps predictably at this point, this is not absolute either. So we’ll have to write 𝒫(ω)M when referring to M’s version of 𝒫(ω).
Finally, ZFC can prove that there’s a bijection from 𝒫(ω) to ℝ, meaning that this bijection exists in every model. Thus anything we prove about the size of 𝒫(ω) can be carried over to a statement about the size of ℝ. Model-theoretically, we can say that in every model M, |𝒫(ω)M| = |ℝM|. It will turn out to be more natural to prove things about 𝒫(ω) than ℝ.
Okay, we’re ready to make the continuum hypothesis false! We’ll do this by choosing a partially ordered set (P, ≤) whose extension as a Boolean algebra (B, ≤) has the property that no matter what M-generic filter G in B you choose, M[G] will interpret its existence as proof that |𝒫(ω)| ≥ ℵ2.
Making |𝒫(ω)| ≥ ℵ2
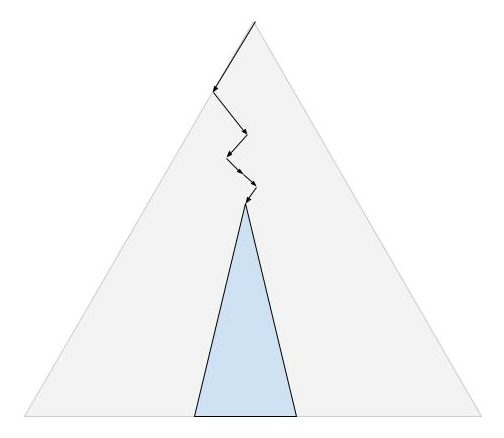
Let P = { f ∈ M | f is a finite partial function from ω2M × ω to {0,1} }. Let’s have some examples of elements of P. The simplest is the empty function ∅. More complicated is the function {((ω+1, 13), 1)}. This function’s domain has just one element, the ordered pair (ω+1, 13), and this element is mapped to 1. The function {((14, 2), 0), ((ω1M•2, 2), 1)} is defined on two elements: (14, 2) and (ω1M•2, 2). And so on.
We’ll order P by reverse inclusion: f ≤ g iff f ⊇ g. Intuitively, f ≤ g if f is a function extension of g: f is defined everywhere that g is and they agree in those places. For instance, say f = {((ω, 12), 0)}, g = {((ω, 12), 0), ((13, 5), 1)}, h = {((ω, 12), 1)}, and p = {((ω, 11), 1)}. Check your understanding by verifying that (1) g ≤ f, (2) f and h are incomparable and have no common lower bound, and (3) f and p are incomparable but do have a common lower bound (what is it?).
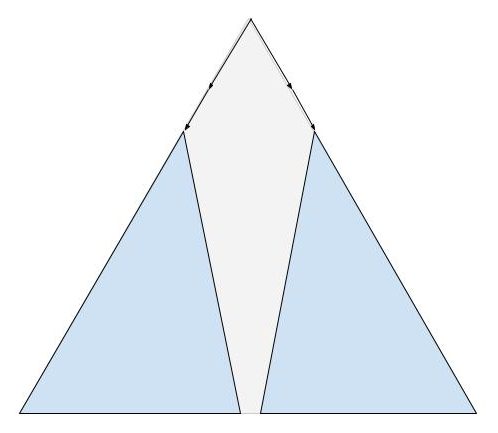
The empty function ∅ is a subset of every function in P, meaning that ∅ is bigger than all functions. Thus ∅ is the top element of this partial order. And every f in P is finite, allowing a nice visualization what the partial order (P, ≤) looks like:
Now, G will be an M-generic ultrafilter in the Boolean extension (B, ≤) of (P, ≤). G is the set that we’re ultimately adding onto M, so we want to know some of its properties. In particular, how will we use G to show that |𝒫(ω)| = ℵ2?
What we’re going to do is construct a new set out of G as follows: first take the intersection of P with G. (remember that G is an ultrafilter in B, so it doesn’t only contain elements of P). P⋂G will be some set of finite partial functions from ω2M × ω to {0,1}. We’ll take the union of all these functions, and call the resulting set F. What we’ll prove of F is the following:
(1) F := ⋃(P⋂G) is a total function from ω2M × ω to {0,1} (2) For every α, β ∈ ω2M, F(α, •) is a distinct function from F(β, •).
A word on the second clause: F takes as input two things: an element of ω2M and an element of ω. If we only give F its first input, then it becomes a function from ω to {0,1}. For α ∈ ω2M, we’ll give the name Fα to the function we get by feeding α to F. Our second clause says that all of these functions are pairwise distinct.
Now, the crucial insight is that each Fα corresponds to some subset of ω, namely {n ∈ ω | Fα(n) = 1}. So F defines |ω2M|-many distinct subsets of ω. So in M[G], it comes out as true that |𝒫(ω)M| ≥ |ω2M|. It’s also true in M[G] that |ω2M| = ℵ2M, and so we get that |𝒫(ω)M| ≠ ℵ1M. This is ¬CH!
Well… almost. There’s one final subtlety: |𝒫(ω)M| ≠ ℵ1M is what ¬CH looks like in the model M. For ¬CH to be true in M[G], it must be that that |𝒫(ω)M[G]| ≠ ℵ1M[G]. So what if |𝒫(ω)M| ≠ |𝒫(ω)M[G]|, or ℵ1M ≠ ℵ1M[G]? This would throw a wrench into our proof: it would mean that M[G] believes that M’s version of 𝒫(ω) is bigger than M’s version of ℵ1, but M[G] might not believe that its own version of 𝒫(ω) is bigger than its version of ℵ1. This is the subject of cardinal collapse, which I will not be going into. However, M[G] does in fact believe that 𝒫(ω)M = 𝒫(ω)M[G] and that ℵ1M = ℵ1M[G].
Alright, so now all we need to do to show that M[G] believes ¬CH is to prove (1) that F is a total function from ω2M × ω to {0,1}, and (2) that for every α, β ∈ ω2M, Fα is distinct from Fβ. We do this in three steps:
F is a function.
F is total.
For every α, β ∈ ω2M, Fα is distinct from Fβ.
Alright so how do we know that F is a function? Remember that F = ⋃(P⋂G). What if some of the partial functions in P⋂G are incompatible with each other? In this case, their union cannot be a function. So to prove step 1 we need to prove that all the functions in P⋂G are compatible. This follows easily from two facts: that G is an ultrafilter in B and P is dense in B. The argument: G is an ultrafilter, so for any f, g ∈ P there’s some element f∧g ∈ B that’s below both f and g. All we know about f∧g is that it’s an element of B, but we have no guarantee that it’s also a member of P, our set of partial functions. In other words, we can’t say for sure that f∧g is actually a partial function from ω2M × ω to {0,1}. But now we use the fact that P is dense in B! By the definition of density, since f∧g is an element of B, P must contain some h ≤ f∧g. Now by transitivity, h ≤ f and h ≤ g. So f and g have a common function extension, meaning they must be compatible functions! Pretty magical right?
So F is a function. But how do we know that it’s total? We prove this by looking closely at the dense subsets of P. In particular, for any α ∈ ω2M and any n ∈ ω, define Dα,n := {f ∈ P | (α, n) ∈ dom(f)}. This is a dense subset of P. Why? Well, regardless of what α and n are, any function f in P is either already defined on (α, n), in which case we’re done, or it’s not, in which case f has a function extension with (α, n) in its domain. So from any element of P, you can follow the order downwards until you find a function with (α, n) in its domain. Since Dα,n is dense in P and G is M-generic, G must have some element in common with Dα,n. Thus G contains an element f of P that has (α, n) in its domain. This f is one of the functions that we union over to get F, so F must have (α, n) in its domain as well! And since α and n were totally arbitrary, F must be total.
Finally, why are the “Fα”s pairwise distinct? Again we construct dense subsets for our purposes: for any α, β ∈ ω2M, define Dα,β := {f ∈ P | fα ≠ fβ}. This is clearly dense (you can always extend any f in P to make fα and fβ disagree somewhere). So G contains an element f of P for which fα ≠ fβ. And thus it must also be true of F that Fα ≠ Fβ!
And we’re done! We’ve shown that once we add G to M, we can construct a new set F = ⋃(P⋂G) such that F encodes |ω2M|-many distinct subsets of ω, and thus that M[G] ⊨ |𝒫(ω)| ≥ ℵ2.
Making |𝒫(ω)| ≥ ℵ420
What’s great is that this argument barely relied on the “2” in ω2M. We could just as easily have started with P = {f ∈ M | f is a finite partial function from ω420M × ω to {0,1}}, constructed an M-generic filter G in the Boolean extension of P, then defined F to be ⋃(P⋂G).
G is still an ultrafilter in B and P is still dense in B, so F is still a function.
Dα,n := {f ∈ P | (α, n) ∈ dom(f)} is still a dense subset of P for any α ∈ ω420M and any n ∈ ω, so F is still total.
And Dα,β := {f ∈ P | fα ≠ fβ} is still a dense subset of P for any α, β ∈ ω420M, so all the “Fα”s are pairwise distinct.
And now F encodes |ω420M|-many distinct subsets of ω! The final step, which I’m going to skip over again, is showing that M[G] believes that |ω420M| = |ω420M[G]|, i.e. that cardinal collapse doesn’t occur.
And there we have it: this choice of P gives us a new model M[G] of ZFC that believes that |𝒫(ω)| ≥ ℵ420! Note how easy and quick this argument is now that we’ve gone through the argument for how to make M[G] believe |𝒫(ω)| ≥ ℵ2. This is a great thing about forcing: once you really understand one application, other applications become immensely simpler and easier to understand.
Making |𝒫(ω)| = ℵ1
Okay, we’ve made CH false. Now let’s make it true! This time our choice for (P, ≤) will be the following:
P = {f ∈ M | f is an M-countable partial function from ω1M to 𝒫(ω)M}. Once more we order by reverse inclusion: f ≤ g iff f ⊇ g.
A crucial thing to notice is that I’ve merely required the functions in P to be M-countable, rather than countable. For a set to be M-countable is for there to exist an injection in M from set to ω. Any M-countable set is countable, but some countable sets may not be M-countable (like M itself!). In particular, we know that ω1M is actually a countable set, meaning that if we required true countability instead of just M-countability, then P would include some total functions! But M has no injection from ω1M to ω, so no function in P can be total. This will be important in a moment!
We get our M-generic ultrafilter G and define F := ⋂(P⋂G). Now we want to show that F is a total and surjective function from ω1M to 𝒫(ω). As before, we proceed in three steps:
F is a function
F is total
F is surjective
Step 1: G is an ultrafilter and P is dense in G, so the same argument works to show that all elements of P⋂G are compatible: (1) ultrafilter implies that any f, g in P⋂G have a least upper bound f∧g in B, (2) density of P in G implies that f∧g has a lower bound h in P, so (3) f and g have a common function extension . Thus F is a function.
Step 2: Dα := {f ∈ P | α ∈ dom(f)} is dense in P for any α ∈ ω1M, so F is total.
Step 3: DA := {f ∈ P | A ∈ image(f)} is dense in P for any A ∈ 𝒫(ω)M. Why? No f in P is total, so any f in P can be extended by adding one more point (α, A) where α ∉ dom(f). Thus A ∈ image(F) for any A ∈ 𝒫(ω), so F is surjective.
So F is a total surjective function from ω1M to 𝒫(ω)M, meaning that in M[G] it’s true that |𝒫(ω)M| ≤ ℵ1M. And since ZFC proves that |𝒫(ω)| > ℵ0, it follows that M[G] ⊨ |𝒫(ω)| = ℵ1.
You might have noticed that each of these arguments could just as easily have been made if we had started out with defining P as the finite partial functions in M from ω1M to 𝒫(ω)M. This is true! If we had done this, then we still would have ended up proving that F was a total surjective function from ω1M to 𝒫(ω)M, and therefore that |𝒫(ω)M| = ℵ1M. However, this is where cardinal collapse rears its ugly head: the final step is to prove that |𝒫(ω)M| = |𝒫(ω)M[G]| and that ℵ1M = ℵ1M[G]. This requires that P be the countable partial functions rather than just the finite ones.
And with that final caveat, we see that M[G] believes that |𝒫(ω)| = ℵ1.
Making |𝒫(ω)| ≤ ℵ314
Let P = {f ∈ M | f is an M-countable partial function from ω314M to 𝒫(ω)} and order by reverse inclusion: f ≤ g iff f ⊇ g.
⋂(P⋂G) is again a total and surjective function from ω314M to 𝒫(ω), following the exact same arguments as in the previous section. Cardinal collapse doesn’t occur here either, so M[G] believes that |𝒫(ω)| ≤ ℵ314.
✯✯✯
We’ve proven the independence of the Continuum Hypothesis from ZFC! We’ve done more: we’ve also shown how to construct models of ZFC in which we have lots of control over the size of 𝒫(ω). Want a model of ZFC in which |𝒫(ω)| is exactly ℵ1729? Just force with the right P and you’re good to go! There’s something a bit unsatisfactory about all this though, which is that in each application of forcing we’ve had to skim over some details about cardinal collapse that were absolutely essential to the proof going through. I hope to go into these details in a future post to close these last remaining gaps.
Forcing is a set-theoretic technique developed by Paul Cohen in the 1960s to prove the independence of the Continuum Hypothesis from ZFC. He won a Fields Medal as a result, and to this day it’s the only Fields Medal to be awarded for a work in logic. It’s safe to say that forcing is one of the most powerful techniques that set theorists have at their disposal as they explore the set theoretic multiverse.
Forcing has an intimidating reputation, which is somewhat deserved. The technique involves many moving parts and it takes some time to see how they all fit together. I found these three resources to be excellent for learning the basics of the technique:
Each of these sources takes a slightly different approach, and I think that they complement each other quite well. I’ve produced a high-level outline of the argument for why forcing works, as well as how to use forcing to prove the independence of the CH. I don’t feel quite competent to present all of forcing from the ground up, so this outline is not meant to be self-contained. In particular, I’m gonna assume you’re familiar with the basics of first order logic and ZFC and are comfortable with Boolean algebras. I’m also going to skim over the details of cardinal collapse, which are still fairly opaque to me.
Forcing in 5 lines!
Fix a countable transitive model M ⊨ ZFC and a Boolean algebra (B, ≤) ∈ M.
Define MB := { f ∈ M | f: MB ⇀ B } ⊆ M.
Choose an M-generic ultrafilter G ⊆ B.
For every n in MB, define valG(n) := { valG(m) | (m, b) ∈ n for some b in G }.
Define M[G] := { valG(n) | n ∈ MB }. This is a countable transitive model of ZFC containing all of M as well as G!
We start with a countable transitive model M of ZFC, and then construct a larger countable transitive model M[G] of ZFC that contains a new set G. Let me say a few words on each step.
Step 1 1. Fix a countable transitive model M ⊨ ZFC and a Boolean algebra (B, ≤) ∈ M.
There’s not much to say about Step 1. I suppose it’s worth noting that we’re assuming the existence of a countable transitive model of ZFC, meaning that the results of forcing are all conditioned not just on the consistency of ZFC, but on the existence of transitive models of ZFC, which is significantly stronger. (The existence of countable transitive models is no stronger than the existence of transitive models, by the downwards Lowenheim-Skolem theorem.)
Moving on!
Step 2 2. Define MB := { f ∈ M | f: MB ⇀ B }
MB is sometimes called a Boolean-valued model of ZFC. The elements of MB are called “B-names” or “B-valued sets” or just “B-sets” (as I’ll call them). These B-sets are partial functions in M that go from MB to B. “Huh? Hold on,” I hear you saying, “Isn’t that a circular definition?”
It might look circular, but it’s not; it’s inductive. First of all, regardless of what MB is, the empty set counts as a partial function from MB to B: all its inputs are in MB, all its outputs are in B, and no input gets sent to multiple outputs! ∅ is also in M, so ∅ is an element of MB. But now that we know that ∅ is in MB, we can also construct the function {(∅, b)} for each b in B. This satisfies the criterion of “being a partial function from MB to B”, and it is in M because B is in M. So for any b in B, {(∅, b)} is in MB. And now we can construct more partial functions with these new elements of MB, like {(∅, b), ({(∅, b’)}, b’’)} and so on.
If you’re still not convinced that the definition of MB is sensible, we can define it without any apparent circularity, making the induction explicit:
V0 = ∅
Vα+1 = { f ∈ M | f is a partial function from Vα to B } for any ordinal α in M.
Vλ = ⋃{Vα | α ∈ λ} for any limit ordinal λ in M.
Finally, MB = ⋃{Vα | α ∈ M}.
Okay, so now we know the definition of MB. But what is it? How do we intuitively think about the elements of MB? One way is to think of them as “fuzzy sets”, sets that contain each other to varying degrees. In this way of seeing things, the Boolean algebra B is our extension of the trivial Boolean algebra {True, False} to a more complicated Boolean algebra that allows intermediate truth values as well. So for instance, of the B-set {(∅, b)} we can say “it contains ∅ to degree b, and contains nothing else”. Of the B-set {(∅, b), ({(∅, b’)}, b’’)} we may say “it contains ∅ to degree b, and contains [the set that contains ∅ to degree b’] to degree b’’, and nothing else.” And so on.
Every Boolean algebra has a top element ⊤ corresponding to “definite truth” and a bottom element ⊥ corresponding to “definite falsity”, so our B-sets don’t have to be entirely fuzzy. For instance the B-set {(∅, ⊤)} definitely contains ∅ and definitely doesn’t contain anything else. It can be thought of as intuitively similar to the set {∅} in M. And the B-set {(∅, ⊥)} definitely doesn’t contain ∅, or anything else for that matter. This brings up an interesting question: how is the B-set {(∅, ⊥)} any different from the B-set ∅? They have the same intuitive properties: both contain nothing (or said differently, contain each thing to degree ⊥). Well that’s right! You can think of {(∅, ⊥)} and ∅ as two different names for the same idea. They are technically distinct as names, but in Steps 3 and 4 when we collapse MB back down to an ordinary model of ZFC, the distinction between them will vanish. (The details of how exactly we assign B-values to sentences about MB are interesting in their own right, and might deserve their own post.)
So intuitively what we’ve done is take our starting model M and produce a new structure that looks a lot like M in many ways except that it’s highly ambiguous: in addition to all the old sharp sets we have all these new fuzzy sets that are unsure about their members. In the next two steps we collapse all this ambiguity back down, erasing all of the fuzziness. It turns out that there are many ways to collapse the ambiguity (one for each ultrafilter in B in fact!), but we’ll want to choose our ultrafilter very carefully so that we (1) don’t end up back where we started, (2) end up with a model of ZFC, and (3) end up with an interesting model of ZFC.
Step 3 3. Choose an M-generic ultrafilter G ⊆ B.
There’s some terminology here that you might be unfamiliar with.
Firstly, what’s an ultrafilter? It’s a nonempty proper subset of B that’s closed upwards, closed under intersection, and contains one of b or ¬b for each b in B. I talked about ultrafilters here in the context of power sets, but it generalizes easily to Boolean algebras (and there are some pretty pictures to develop your intuitions a bit).
Okay, so that’s what ultrafilters are. What is it to be a generic ultrafilter? A generic ultrafilter is one that intersects every dense subset of B. What’s a dense subset of B? A dense subset of a Boolean algebra (B, ≤) is any subset of B\{⊥} that lower-bounds all of B\{⊥}. In other words, D is a dense subset of B if for every element of B\{⊥} there’s a lower element of D. Intuitively, D is like a foundation that the rest of B\{⊥} rests upon (where “upwards” corresponds to “greater than”). No matter where you are in B\{⊥}, you can follow the order downwards and eventually find yourself at an element of D. And a generic ultrafilter is an ultrafilter that shares something in common with each of these foundational subsets.Why have we excluded the bottom element of B, ⊥? If we hadn’t done so then the dense subsets would just be any and all sets containing ⊥! Then any generic ultrafilter would have to contain ⊥, but this is inconsistent with the definition of an ultrafilter!
Finally, what’s an M-generic ultrafilter? Recalling that a generic ultrafilter has to intersect every dense subset of B, an M-generic ultrafilter only needs to intersect every dense subset of B that’s in M.
I hear a possible objection! “But you already told us that B is in M! And since ZFC has the power set axiom, don’t we know that M must also contain all of B’s subsets? If so then M-genericity is no different from genericity!” The subtlety here is that the power set axiom guarantees us that M contains a set 𝒫(B) that contains all the subsets of B that are in M. Nowhere in ZFC is there a guarantee that every subset of B exists, and in fact such a guarantee is not possible in any first-order theory whatsoever! (Can you see how this follows from the downward Lowenheim-Skolem theorem?) The power set axiom doesn’t create any subsets of B, it merely collects together all the subsets of B that already exist in M.
Now, why do we care about G being M-generic? A few steps down the line we’ll see why M-genericity is such an important property, but in all honesty my intuition is murky here as to how to motivate it a priori. For now, take it on faith that M-genericity ends up being exactly the right property to require of G for our purposes. We’ll end up making extensive use of the fact that G intersects every dense subset of B in M.
Very keen readers might be wondering: how do we know that an M-generic ultrafilter even exists? This is where the countability of M saves us: since M is countable, it only contains countably many dense subsets of B: (D0, D1, D2, …). We construct G as follows: first we choose any b0 ∈ D0. Then for any n ∈ ℕ, since Dn+1 is dense in B, we can find a dn+1 ∈ Dn+1 such that dn+1 ≤ dn. Now we have an infinite descending chain of elements from dense subsets. Define G to be the upwards closure of {dn | n ∈ ℕ}, i.e. G = {b ∈ B | b ≥ dn for some n ∈ ℕ}. This is M-generic by construction, and it’s an ultrafilter: for any b ∈ B, either {b’ ∈ B | b’ ≤ b} or {b’ ∈ B | b’ ≤ ¬b} is dense, implying that G contains either b or ¬b. (Convince yourself that it’s also closed upwards and under ∧.)
Really important note: this proof of G’s existence relies on the countability of M. But from M’s perspective, it isn’t countable; i.e. M doesn’t believe that there’s a bijection that puts each set in correspondence with an element of omega. So M can’t prove the existence of G, and in fact G is a set that doesn’t exist within M at all.
Step 4 4. For every n in MB, define valG(n) := {valG(m) | (m, b) ∈ n for some b in G}.
Ok, next we use G to define a “valuation function” valG(•). This function takes the B-sets created in Step 2 and “collapses” them into ordinary sets. It’s defined inductively: the G-valuation of a B-set n is defined in terms of the G-valuations of the elements of n. (As a side note, the fact that this definition works relies on the transitivity of our starting model! Can you see why?)
Let’s work out some simple examples. Start with n = ∅. Then valG(∅) = {valG(m) | (m, b) ∈ ∅ for some b in G} = ∅, because there is no (m, b) in ∅. Thus G evaluates ∅ as ∅. So far so good! Now for a slightly trickier one: n = {(∅, b)}, where b is some element of B.
valG( {(∅,b)} ) = {valG(m) | (m, b) ∈ {(∅, b)} for some b in G} = {valG(m) | m = ∅ & b ∈ G}
There are two cases: either b is in G or b is not in G. In the first case, {(∅, b)} is evaluated to be {∅}. In the second, {(∅,b)} is evaluated to be {}. What’s the intuition here? G is a subset of B, and we can think of it as a criterion for determining which Boolean values will be collapsed to True. And since G is an ultrafilter, every Boolean value will either be collapsed to True (if b ∈ G) or to False (if ¬b ∈ G). Recall that we thought of {(∅, b)} as a B-set that “contained ∅ to degree b”. Our G-evaluation of this set removed all fuzziness: if b was included in G then we evaluate {(∅, b)} as actually containing ∅. And if not, then we said that it didn’t. Either way, all fuzziness has been removed and we’ve ended up with an ordinary set!
The same happens for every B-set. When we feed it into the function valG(•), we collapse all its fuzziness and end up with an ordinary set, whose members are determined by our choice of B.
Step 5 5. Define M[G] := {valG(n) | n ∈ MB}. M[G] is a countable transitive model of ZFC such that M ⊆ M[G] and G ∈ M[G].
Now we simply evaluate all the B-sets and collect them together, and give the result a name: M[G]. This part is easy: the hard work has already been done in defining MB and valG. What remains is to show that this new set is a countable transitive model of ZFC containing all of M as well as G. Let’s do this now.
First of all, why is M[G] countable? Well, M is countable and MB is a subset of M, so MB is countable. And valG is a surjective function from MB into M[G], so |M[G]| ≤ |MB|.
Second, why is M[G] transitive? This follows immediately from its definition: the elements of M[G] are G-valuations, and elements of G-valuations are themselves G-valuations. So elements of elements of M[G] are themselves elements of M[G]. That’s transitivity!
Third, why is M[G] a model of ZFC? Er, we’ll come back to this one.
Fourth, why is M ⊆ M[G]? To show this, we’ll take any arbitrary set x in M and show that it exists in M[G]. To do this, we first define a canonical name for x: a B-set Nx that acts as the surrogate of x in MB. Define Nx to be {(Ny, ⊤) | y ∈ x}. (Make sure that Nx is actually in MB!) What’s the G-valuation of Nx? It’s just x! Here’s a proof by ∈-induction:
First, N∅ = {(Ny,⊤) | y ∈ ∅} = ∅. So valG(N∅) = valG(∅) = {valG(m) | (m, b) ∈ ∅ for some b in G} = ∅.
Now, assume that valG(Ny) = y for every y ∈ x. Then valG(Nx) = {valG(Ny) | (Ny, b) ∈ Nx for some b in G} = {y | (Ny, ⊤) ∈ Nx} = {y | y ∈ x} = x.
Thus by ∈-induction, for all x, valG(Nx) = x.
Finally, why is G ∈ M[G]? We prove this by finding a B-set that G-valuates to G itself. Define A := {(Nb, b) | b ∈ B}. Then valG(A) = { valG(m) | (m, b) ∈ A for some b in G } = {valG(Nb) | b ∈ G} = {b | b ∈ G} = G.
And there it is! We’re done!
Ha ha, tried to pull a fast one on you. We still have one crucial step remaining: proving that M[G] is actually a model of ZFC! As far as I know, there’s no concise way to do this… you have to actually go through each axiom of ZFC and verify that M[G] satisfies it. I’m not going to do that here, but I will provide proofs of four axioms to give you a flavor.
Infinity: M contains a set I satisfying the axiom of infinity and M ⊆ M[G]. So I ∈ M[G], and it still satisfies infinity (still contains ∅ and is closed under successor).
Pairing: Let x and y be any two sets in M[G]. Then for some n1 and n2 in MB, x = valG(n1) and y = valG(n2). Now define n := {(n1, ⊤), (n2, ⊤)} ∈ MB. Then valG(n) = {x, y}.
Union: Let x be any element of M[G]. Since M[G] is transitive, every element y of an element of x is in M[G]. So for each such y there’s a B-set ny such that valG(ny) = y. Define n := {(ny,⊤) | y ∈ z for some z ∈ x}. Then valG(n) = {valG(ny) | y ∈ z for some z ∈ x} = {y | y ∈ z for some z ∈ x} = ⋃x.
Comprehension: Let φ(y) be any first-order formula in the language of ZFC, and x ∈ M[G]. For every element y of x, let ny be any B-set that G-valuates to y. Define n := {(ny,⊤) | y ∈ x & φ(y)}. Then valG(n) = {y ∈ x | φ(y)}.
And I leave you to fill in the rest of the axioms of ZFC for yourself. Much of it looks very similar to the proofs of pairing, union, and comprehension: make the natural choice for a B-set which G-valuates to the particular set whose existence you’re trying to prove. And THEN you’re done!
✯✯✯
Okay! If you’ve made it this far, take a breather and congratulate yourself. You now understand how to adjoin a new set to an existing model of ZFC so long as this new set is an M-generic ultrafilter in a Boolean algebra B ∈ M). And this process works equally well no matter what Boolean algebra you pick!
In fact, the choice of the Boolean algebra in step 1 is the key degree of freedom we have in this whole process. B isn’t the set that we end up adjoining to M, and in fact B is always chosen to be an element of our starting model. But the fact that G is always chosen to be an M-generic filter in B means that the structure of B greatly influences what properties G has.
You might notice that we also technically have another degree of freedom in this process: namely step 3 where I said “choose an M-generic filter G in B”. While this is technically true, in practice much of forcing is about finding really clever choices of B so that any M-generic filter in B has whatever interesting property we’re looking for.
There’s another subtlety about the choice of B, namely that in applications of forcing one generally starts with a partially ordered set (P, ≤) and then extends it to a Boolean algebra B. A really cool result with an even cooler topological proof is that this extension is always possible. For any choice of P one can construct a complete Boolean algebra B such that P is order-isomorphic to a dense subset of B. (In a sentence, we turn P into a topological space whose open sets are the downwards-closed subsets and then let B be the set of regular open sets ordered by inclusion. More on this below.)
What’s great about this is that since P is dense in B, all dense subsets of P are also dense subsets of B. This means that we can analyze properties of our M-generic ultrafilter G in B solely by looking at the dense subsets of P! This means that for many purposes you can simply ignore the Boolean algebra B and let it do its work in the background, while focusing on the partially ordered set (P, ≤) you picked out. The advantage of this should be obvious: there are many more partially ordered sets than there are Boolean algebras, so we have much more freedom to creatively choose P.
Let’s summarize everything by going over the outline we started with and filling in a few details:
Forcing in slightly more than 5 lines
Fix a countable transitive model M ⊨ ZFC and a partial order (P, ≤) ∈ M.
Extend P to a Boolean algebra (B, ≤) ∈ M.
Define T := {A ⊆ P | A is closed downwards}.
Define B := {S ∈ T | Int(Cl(S)) = S}.
(B, ⊆) is a Boolean algebra: ¬A = Int(Ac), A∧B = A⋂B, A∨B = Int(Cl(A∪B)).
P is order-isomorphic to a dense subset of B
For p ∈ P, define S(p) := {q ∈ P | q ≤ p} ∈ B.
S is an order-isomorphism from P to B and {S(p) | p ∈ P} is dense in B.
Define MB := { f ∈ M | f: MB ⇀ B }.
Choose an M-generic ultrafilter G ⊆ B.
Since M is countable, we can enumerate the dense subsets of B in M: (D0, D1, D2, …)
Choose any b0 ∈ D0.
For any n ∈ ℕ, since Dn+1 is dense in B, we can find a dn+1 ∈ Dn+1 s.t. dn+1 ≤ dn.
G := { b ∈ B | b ≥ dn for some n ∈ ℕ } is an M-generic ultrafilter in B.
For every n in MB, define valG(n) := { valG(m) | (m, b) ∈ n for some b in G }.
Define M[G] := { valG(n) | n ∈ MB }.
M[G] is a countable transitive model of ZFC.
M ⊆ M[G]
For any x ∈ M, define Nx := {(Ny,⊤) | y ∈ x} ∈ MB.
Then valG(Nx) = x, so x ∈ M[G].
G ∈ M[G]
Define A := {(Nb, b) | b ∈ B} ∈ MB.
valG(A) = G, so G ∈ M[G].
We are now ready to apply forcing to prove the independence of CH from ZFC! In Part 2 you will learn exactly what choice of P makes the cardinality of the continuum ≥ ℵ2 (thus making CH false) and what choice of P makes the cardinality of the continuum exactly ℵ1 (thus making CH true). In fact, I’ll do you one better: in Part 2 you’ll learn what to make P in order to make the cardinality of the continuum larger than ℵ69, ℵ420, or virtually any other cardinality you like!
Assumed background knowledge: basic set theory lingo (∅, singleton, subset, power set, cardinality), what is first order logic (structures, universes, and interpretations), what are ℕ and ℝ, what’s the difference between countable and uncountable infinities, and what “continuum many” means.
1 Introduction Here I give a high-level description of what an ultraproduct is, and provide a few examples. Skippable if you want to jump straight to the math!
2 Hypernaturals Simplified Here you get a first glimpse of the hypernaturals. It’s a fuzzy glimpse from afar, and our first attempt to define them is overly simplified and imperfect. Nonetheless, we get some good intuitions for how hypernatural numbers are structured, before eventually confronting the problem at the core of the definition.
3 Hypernaturals in all their glory We draw some pretty pictures and introduce the concept of an ultrafilter. The concept is put to work immediately, allowing us to give a full definition of the hypernaturals with no simplifications. The issues with the previous definition have now been patched, and the hypernaturals are a well-defined structure ripe to be explored.
4 Ultraproducts and Łoś’s theorem We describe how to pronounce “Łoś”, define what an ultraproduct is, and see how the hypernaturals are actually just the ultraproduct of the naturals. And then we prove Łoś’s theorem!
5 Infinitely Large Primes With the newfound power of Łoś’s theorem at our hands, we return to the realm of the hypernaturals and start exploring its structure. We describe some infinitely large prime numbers, and prove that there are infinitely many of them. We find more strange infinitely large hypernatural numbers in our exploration: numbers that can be divided by 2 ad infinitum, numbers that are divisible by every finite number, and more. We learn that there’s a subset of the hypernaturals that is arranged just like the positive rational numbers, but that the hypernaturals are not dense.
6 Ultraproducts and Compactness We zoom out from the hypernaturals, and show that ultraproducts can be used to give the prettiest proof of the compactness theorem for first order logic. We prove it first for countable theories, and then for all theories. We then get a little wild and discuss some meta-logical results involving ultraproducts, definability, and compactness.
7 All About Countable Saturation We now describe the most powerful property of ultraproducts: countable saturation. And then we prove it! With our new tool, we dive back into the hypernaturals to learn more about their structure. We show that for any countable set of hypernaturals, there’s a hypernaturals that’s divisible by them all, and see that this entails the existence of uncountably many hypernatural primes. We prove that the hypernaturals have uncountable cofinality and coinitiality. And from this we see that no two hypernaturals are countably infinitely far apart; all distances are finite or uncountable! We wrap up with a quick proof that ultraproducts are always either finite or uncountable, and a mind-blowing result that relates ultraproducts to the continuum hypothesis.
7.5 Shorter Proof of Countable Saturation I give a significantly shorter and conceptually simpler proof of countable saturation than the previous post. Then I wax philosophical for a few minutes about constructivism in the context of ultraproduct-related proofs.
After I had finished writing up and illustrating the proof of countable saturation in the last post, I came up with a significantly simpler proof. Darn! I don’t want to erase all those pretty pictures I already made, so I’ll just include this proof as a separate little bonus.
I’m also going to be a little more careful with notation that I have been thus far, by distinguishing structures from their universes. The fancy 𝔐 will refer to a structure, which has both a universe as well as an interpretation of all the constant, function, and relation symbols. The universe of 𝔐 will be written with a non-fancy M.
The Proof
Let 𝔐 be the ultraproduct ∏(𝔐k)k∈ℕ/U. Let S = {φ1(x), φ2(x), φ3(x), …} be any countable set of formulas with countably many parameters.
Suppose S is finitely realizable in 𝔐. Then for each n, 𝔐 ⊨ ∃x (φ1(x)∧…∧φn(x)). So by Łoś’s theorem, for each n, the set of models that realize φ1(x)∧…∧φn(x) is U-large. So for each n, { k | 𝔐k ⊨ ∃x (φ1(x)∧…∧φn(x)) } ∈ U.
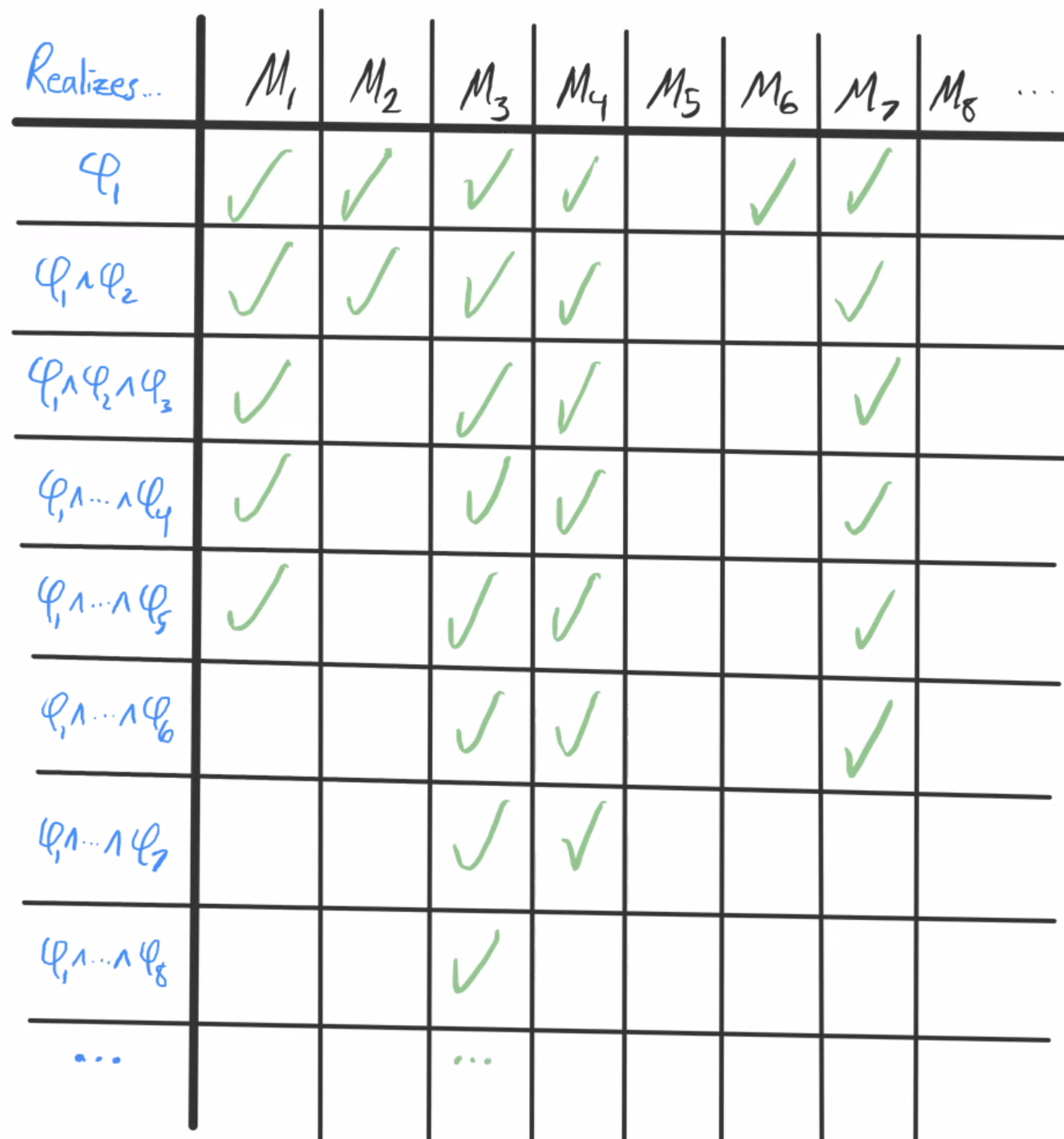
Here’s a visualization:
In this image, 𝔐1 realizes φ1(x)∧…∧φ5(x), 𝔐3 realizes all of S, and 𝔐5 doesn’t realize φ1(x). The finite realizability of S tells us that {1, 2, 3, 4, 6, 7, …} (the indices of models realizing φ1) is U-large. So are {1, 2, 3, 4, 7, …}, {1, 3, 4, 7, …}, {3, 4, 7, …}, and so on.
Now we add a new constant c to L. We want to define c on each 𝔐k in such a way that in 𝔐, c refers to an element of M that realizes all of S. We do this by saying that in 𝔐k, c refers to an element of Mk that realizes as large an initial segment of S as possible. More precisely:
For each finite k, consider the largest n for which 𝔐k ⊨ ∃x (φ1(x)∧…∧φn(x)). (In the above example, for k = 1 we’d have n = 5. For k = 2 we’d have n = 2. And so on.) In 𝔐k, c will refer to any object in Mk that realizes φ1 through φn. Let’s call this object ak. In other words, ak is an element of Mk that realizes as large of an initial segment of S as possible, and c refers to this element.
Two special cases: What if 𝔐k realizes all of S? Then in 𝔐k, c will refer to any ak ∈ Mk that realizes all of S. And if 𝔐k doesn’t realize φ1? Then in 𝔐k, c will refer to any arbitrary element of Mk.
One important consequence of this way of defining the “ak“s is that for any k and n, ak realizes φ1(x)∧…∧φn(x) in 𝔐k if and only if 𝔐k ⊨ ∃x (φ1(x)∧…∧φn(x)). This’ll be used in a few lines, marked by a blue =.
The ultraproduct construction now tells us exactly what c refers to in 𝔐: the equivalence class [a1, a2, a3, …]. All that’s left to do is to prove that this element of 𝔐 realizes all of S. Here’s the argument:
Let φn(x) be any arbitrary formula in S. { k | ak realizes φn in 𝔐k } ⊇ { k | ak realizes φ1(x)∧…∧φn(x) in 𝔐k } = { k | 𝔐k ⊨ ∃x (φ1(x)∧…∧φn(x)) } ∈ U. Since ultrafilters are closed under supersets, { k | ak realizes φn(x) in 𝔐k } ∈ U Since c refers to ak in 𝔐k, { k | 𝔐k ⊨ φn(c) } ∈ U. So by Łoś’s theorem, 𝔐 ⊨ φn(c). So in 𝔐, [a1, a2, a3, …] realizes φn. Since φn was an arbitrary formula in S, [a1, a2, a3, …] realizes all of S.
And we’re done! Since [a1, a2, a3, …] realizes all of S, S is realizable!
Concluding thoughts
This proof is pretty similar to the one in the last post, but with some unnecessary bells and whistles removed. Unlike the last one, this one was designed by me personally, so it’s possible there’s something important missing. But I doubt it!
It has a similar “constructive” character to the last proof, in that it doesn’t just say that S is realizable in M, it also tells you exactly what the element of M that realizes S is. I’ve noticed that this “constructiveness” is a common feature of proofs in this area of logic. Look back at our proofs of the compactness theorem. They didn’t just tell us that our starting set of sentences was satisfiable; they actually gave us a recipe for constructing a model of that set of sentences.
Now, why am I putting constructive in quotation marks? The thing is, on the traditional notion of constructiveness, none of these proofs are really constructive, because free ultrafilters can’t be shown to exist for arbitrary infinite sets without the axiom of choice. (Remember our usage of Zorn’s lemma in Part 3 of the series?) The axiom of choice is a big no-no for the constructivist, and there is a sense in which you can’t super concretely “get your hands on” a free ultrafilter. There’s no nice general procedure for specifying what’s in the ultrafilter and what’s not; if there was we wouldn’t need choice, we’d just define the ultrafilter with this procedure!
Nonetheless, I think there’s a nice notion of “conditional constructiveness”, where you say “assuming that you somehow get your hands on an ultrafilter, then what can you construct with it”. And in this sense, you can construct all the things I gave examples of earlier.
Not all nonconstructive objects are equally scary or hard-to-comprehend in my eyes, so it’s nice to be able to say something like “these are both nonconstructive in the absolute sense, but the first is constructive conditional on the existence of a free ultrafilter on the naturals, and the second is constructive conditional on the ZFC-independent existence of a large cardinal.” An approach like this frees you up to care about constructiveness without having to ascribe to the full strict Brouwerian philosophy.
I’ve spent a lot of time in the last posts gushing about how cool and powerful Łoś’s theorem is. But Łoś’s theorem is only the second most powerful property of ultraproducts that I know. The most powerful is what’s known as countable saturation.
Countable saturation is a property of structures, and it’s all about definability and parameters. Here it is in one sentence: M is countably saturated if any set of formulas using countably many parameters which is finitely realized in M is also realized in M.
Said another way, M is countably saturated means that: for any set of formulas X with countably many parameters, if the set of subsets of M defined by finite subsets of X has nonempty intersection, then there’s an object in M that satisfies all of X.
If that was a little too much to parse, don’t worry. We’ll now slowly build up to the definition by discussing definability and parameters.
Definability
Let L be some first-order language, and M be some L-structure. Suppose φ(x) is an L-formula with one free variable, x. We can consider the set of objects in the universe of M that satisfy φ: { m ∈ M | M ⊨ φ(m) }. We say that this is the set defined by φ.
For instance, let L be the language of PA and M be the natural numbers. What are the sets defined by the following formulas?
φ1(x): x > x φ2(x): x = x φ3(x): ∃y (y + y + y = x) φ4(x): ∃y (x + y = x ⋅ y) φ5(x): ∀y ∀z (y ⋅ z = x → (y = 1 ∨ z = 1))
Many many sets of naturals are definable, including uncomputable sets like the set of Busy Beaver numbers. With the language of PA, we are able to define everything on the arithmetic hierarchy, described here.
We’ll denote the set of all definable subsets of a structure M by writing D(M). So D(ℕ) is the set of all arithmetical sets.
Parameters
That’s definability without parameters. What about definability with parameters? Parameters are like additional constants you tack onto a language that refer to a fixed object of your choice. Let’s illustrate this with another example. Suppose that our language is empty, and our structure M contains three objects.
We don’t have any constants, so we have no way to pick out any object by name. We also don’t have any relations or functions, so we have no way to pick out any object by its properties or relationship to other objects. So take a guess, what is D(M)?
Your first thought may have been that D(M) is empty; after all if you can’t pick out any individual objects in the structure, how can you define any sets of objects? But there are still two sets of objects you can always define: the empty set (defined by any contradiction) and the entire structure (defined by any tautology).
D(M) = {∅, M}
Now, suppose that we have a parameter that refers to one particular object. Let’s say the parameter is a.
We now consider formulas φ(x, a) that depend not just on the free variable x, but also this new parameter. For instance, φ(x, a): x = a. What set does this define?
We’ll write D(M, A) for the set of all subsets of M definable with parameters from A. What is D(M, {a}) in our present example?
Answer:
D(M, {a}) = {∅, {a}, M\{a}, M}
We still can’t get every subset of M, because we have no way to single out the objects besides a. Can we do it with two parameters a and b referring to distinct objects in M?
Yes! We don’t need a parameter for the third object, because we can define it with the formula “x ≠ a ∧ x ≠ b”. And once we’ve defined all singletons, we can use disjunctions to define all two-element sets. So with just two parameters, we get to define every possible subset of M.
D(M, {a,b}) = 𝒫(M)
If our structure had 4 objects instead of 3 we could do it with 3 parameters, and if it had 12 objects we could do it with 11 parameters. In general, any finite structure can be fully defined with some finite number of parameters.
Infinite structures are trickier. How many parameters are necessary to fully define ℕ in the language of PA?
Trick question! This just can’t be done in the language of PA. Adding parameters doesn’t actually let us define anything new, because every object can already be referred to: (0, S0, SS0, SSS0, …). Unlike with finite structures, having a name for every object does not guarantee that every set of objects can be defined (though it does guarantee that every finite set of objects can be defined).
But while parameters don’t help with ℕ, they do help with nonstandard models of arithmetic, as these contain objects that can’t be defined with just the symbols in the language. Suppose that K is a parameter that refers to the infinite hypernatural number [0,1,2,3,4,…]. Then { x ∈ *ℕ | x < K } is in D(*ℕ, {K}), but not in D(*ℕ, ∅). We also get { x ∈ *ℕ | x > K ∧ x is prime }, and many other sets.
Finite intersection property
We’re almost ready to define countable saturation. We just need one more concept: the finite intersection property. A set of formulas has the finite intersection property if each of its finite subsets can be realized by some object in M.
Some examples in ℕ:
(i) P = {x < 1, x < 2, x < 3, x < 4, x < 5, x < 6…} (ii) P = {x > 1, x > 2, x > 3, x > 4, x > 5, x > 6, …} (iii) P = {∃y (x = y⋅1), ∃y (x = y⋅2), ∃y (x = y⋅3), …}
For each example, we want to verify that for every finite subset of P, we can find an element that satisfies everything in that finite subset.
For instance, to show that (i) really has the finite intersection property, we think about any finite set of formulas in P, such as {x < 12, x < 33, x < 59, x < 64}. What’s an x that satisfies all of these? Obviously anything less than 12 will work, so we can take x = 11. In general, for any finite set F we can just look at the minimum n for which the sentence “x < n” appears in F and then set x = n – 1. More simply, we can just always set x = 0 and this will satisfy every finite subset.
For (ii), we can take any finite set F and find the maximum n for which the sentence x > n appears in F. Then set x = n + 1.
Figure out (iii) for yourself!
There’s an important difference you may have noticed between (i) and (ii)/(iii). Namely, in (i) we have a number (x = 0) that satisfies all of P. But in (ii) no element of c will satisfy all of P, and the same goes for (iii). (For (ii) this would correspond to an infinitely large number, and for (iii) a number that’s a multiple of every standard natural number. Notice that elements like this do exist in *ℕ!)
What this shows is that a set having the finite intersection property does not guarantee that all formulas in it can be simultaneously satisfied by a single element. That is, unless the structure in question is countably saturated!
Countable saturation
And we’ve arrived! Consider any countable set of parameters A, and then any set of formulas using these parameters. Countable saturation of M means that any such set with the finite intersection property will necessarily be satisfied by some object in M.
So for instance, if M is countably saturated, then the fact that {x is a multiple of 2, x is a multiple of 3, x is a multiple of 4, …} has the finite intersection property implies that there’s an object in M that’s a multiple of 2, 3, 4, 5, and all the rest.
Similarly, in a countably saturated model M, {x > 1, x > 2, x > 3, …} having the finite intersection property implies that there’s an object in M that’s bigger than 1, 2, 3, and every other finite number.
Clearly, ℕ isn’t countably saturated. But *ℕ is! So is *ℝ, and *ℤ! And in fact, as long as your ultraproduct is over models with a countable language and has index set ℕ, it will always be countably saturated! This is the big result we’ve been building up to.
For any countable language L and set of L-structures (M1, M2, M3, …), ∏(Mi)i∈ℕ/U is countably saturated
Let’s prove it!
The Proof
Here’s our setup:
L is a countable language (M1, M2, M3, …) is a family of L-structures U is a free ultrafilter on ℕ M = is the ultraproduct ∏(Mi)i∈ℕ/U A is a countable subset of M LA is the language L with an added constant for every a ∈ A P(x) is a countable set of LA-formulas
Suppose that P(x) is finitely realizable in M. We want to show that it’s also realizable in M. We’ll do this by explicitly constructing the element of M that realizes P(x). Since P(x) is countable, we can choose some enumeration of its formulas: P(x) = {φ1(x), φ2(x), φ3(x), …}.
Begin by writing out the sequence of all of our component models.
We’re going to now start a step-by-step process of eliminating models.
Step 1: Remove all models that don’t realize φ1.
For illustration purposes, let’s suppose that all models except M3 and M7 realize φ1.
All remaining models realize φ1.
Step 2: Remove M1, as well as all models that don’t realize φ1∧φ2.
We’ll suppose that of the remaining models, only M5 doesn’t realize φ1∧φ2. So we remove M1 and M5.
We’re now left with a set of models that all realize φ1∧φ2.
Step 3: Remove M2, as well as all models that don’t realize φ1∧φ2∧φ3.
This time we remove M6 and M10, in addition to M2.
Step 4: Remove M3, as well as all models that don’t realize φ1∧φ2∧φ3∧φ4.
M3 had already been removed, so we don’t do anything with it, but we now also remove M9.
Continue doing this process forever, so that there’s a “Step N” for every natural number N. We end up with something like this:
There’s something really important that we should notice about each of these sets of models: they’re all U-large. In other words, if at any stage we consider the set of indices of the models that remain, this set will be in U. This follows from finite realizability, by the following argument:
Suppose we consider the set of models that remain after four steps. We know that φ1∧φ2∧φ3∧φ4 is realizable in M. By Los’s theorem, this means that that the set of component models that realize φ1∧φ2∧φ3∧φ4 must be U-large. And the set of models remaining after Step 4 is exactly the set of component models that realize φ1∧φ2∧φ3∧φ4, excluding M1, M2, M3, and M4. So the remaining models form a U-large set minus a finite number of elements, which is still U-large!
Of course, the choice of “four” here was totally arbitrary. For any finite N, the set of models remaining after Step N is the set of models that realize φ1∧…∧φN (a U-large set), minus the models M1 through MN (a finite set). So these are always U-large!
Ok, we’re basically done with the proof now. All that’s left is to use our image to construct an element of M that realizes all of P(x). This construction is extremely simple! Here’s what we do:
For each model, go as many steps as you can before that model is crossed out. Visually, this is just going down each column and circling the model at the step before it is crossed out.
Look closely at the circled models. M4 is circled after Step 3, which means that it contains an element that realizes φ1∧φ2∧φ3. M8 is circled after Step 6, so it contains an element realizes φ1∧…∧φ6. And so on. For each circled model, we just pick out the element that realizes as many of the “φ”s as is promised to us by the diagram. Let’s call these elements a1, a2, a3, and so on.
Note that M3 and M7 were ruled out in Step 1. This was because they didn’t even realize φ1. These models are useless for our purposes (they aren’t able to realize any of the φs), so we just choose any arbitrary element from them. M11 wasn’t ruled out in any of the first six steps, so we can’t be sure from the diagram exactly how many of the φs it can realize. But we know that at the very latest, it’ll be removed at Step 12.
Anyway, we now have our sequence:
(a1, a2, a3, a4, …)
The equivalence class of this sequence is an element of M, and it realizes all of P(x)! Why?
Well, let’s think about which elements of the sequence (a1, a2, a3, …) realize φ1. a1 clearly does, as we chose it for that purpose. What about a2? It was chosen to realize φ1∧φ2, so of course it also realizes φ1. a3 doesn’t realize φ1, because M3 didn’t contain any element that realized φ1. a4 realizes φ1 because it realizes φ1∧φ2∧φ3∧φ4. And so on. In general, ak realizes φ1 for every k that’s the index of one of the structures in Step 1 (a U-large set!)
It might be helpful to keep in mind that when we circled a model in row k, the element we chose from that model realizes the conditions in all the earlier rows. We can visualize this as follows:
Now we can easily see which elements realize each formula:
(Bonus question: is it possible for more elements to realize φ5 than those I’ve written? Which elements? And if so, why does that not affect the proof?)
Remember how we showed that the set of models in each row was U-large? Well each of these sets of elements is U-large for the exact same reason! One more application of Łoś’s theorem and we’re done: every φ(x) in P(x) is realized by a U-large set of elements of the sequence (a1, a2, a3, …) , so every φ(x) in P(x) is realized by the element of M that is the equivalence class of this sequence: [a1, a2, a3, …].
And that’s the proof!
Hypernatural Saturation
Countable saturation is an enormously powerful tool for probing the structure of ultraproducts. Let’s see some applications.
We can use countable saturation to prove that there’s a number that’s a multiple of every finite number. We can also use it to prove that there’s a number that’s above every finite number. But we already knew all this. The real power of countable saturation shines through when we use parameters.
Take any countable set of parameters {K1, K2, K3, …}, and choose them to refer to distinct hypernaturals. Now consider the set of sentences {x is divisible by K1, x is divisible by K2, x is divisible by K3, …}. This set of sentences has the finite intersection property. Why? Because finite products always exist. Applying countable saturation, we can conclude that there’s a number that’s divisible by K1, K2, K3, and all the rest!
In other words, every countable set of hypernaturals has a multiple! This is significantly stronger than what we knew before. For one thing, it implies that there are uncountably many hypernatural primes! Suppose that there were countably many hypernatural primes. Collect them in a set P, and find a multiple N of everything in P. Now simply add 1 to N. N+1 is not divisible by any primes. It’s also larger than everything in P (use Łoś to prove this), meaning that it isn’t itself a prime. But by Łoś’s theorem, every hypernatural is either prime or composite! Contradiction.
We can also now show that *N has uncountable cofinality. In other words, every countable set of hypernaturals can be upper bounded. Let {K1, K2, K3, …} be any countable set of hypernaturals. Now consider the set of formulas {x > K1, x > K2, x > K3, …}. Every finite subset can be satisfied; simply take the largest Kn that appears in the subset and add one. Thus there’s some x that’s above the entire set {K1, K2, K3, …}. So every countable set of hypernaturals has an upper bound, meaning that any subset of *ℕ that has no upper bound must be uncountable.
We can get uncountable coinitiality of the infinite hypernaturals by a similar argument. Let {K1, K2, K3, …} be any countable set of infinite hypernaturals and consider the set of formulas {x > 0, x < K1, x > 1, x < K2, x > 2, x < K3, x > 3, …}. Fill out the rest of the argument for yourself!
Uncountable coinitiality of the infinites is a big deal! For one thing, it implies that every infinite hypernatural K is above uncountably many other hypernaturals (as otherwise the set of infinite hypernaturals below K would be a countable coinitial set of infinites). This in turn implies that distances between hypernaturals are either finite or uncountable. They cannot be countably infinite!
Why? Well, ∀x ∀y (x < y → ∃z (z + x = y)) is a sentence of TA that says essentially that for any two numbers x < y, the difference y – x exists as a number. And since we now know that all hypernaturals are either finitely large or uncountably large, we can conclude that differences must be as well!
Applying countable saturation more generally
Let L be any countable language and (Mi)i∈ℕ be any countable sequence of L-structures. We know that the ultraproduct M = ∏(Mi)i∈ℕ/U is countably saturated. Let’s further assume that M is infinite. Consider any countable set {K0, K1, K2, …} of objects in M, and apply countable saturation to the set of sentences {x ≠ K0, x ≠ K1, x ≠ K2, …} to prove that there’s some object in M outside of this set.
But the countable set {K0, K1, K2, …} was fully arbitrary! What this means is that any infinite ultraproduct M must be uncountable! We know that there are finite ultraproducts over countable languages (like the ultrapower of ℤ3, say). So any ultraproducts over a countable language with index set ℕ must be either finite or uncountable. (Exercise: where in the argument did we use the assumption that M is infinite?)
I hope that this next (and final) result blows your mind. It turns out that the continuum hypothesis (ℵ1 = 2ℵ0) has some huge implications on ultraproduct-related matters. I tend to assume that CH is false, which makes the upcoming result a little less exciting to me, but nonetheless I hope it knocks your socks off.
Continuum hypothesis and isomorphic ultrapowers
Fix some countable language L. Suppose that M1 and M2 are elementarily equivalent L-structures, and that |M1| = |M2| = ℵ0. If the continuum hypothesis is true, then the ultrapowers of M1 and M2 are isomorphic! For example, if ℕ is the standard model of arithmetic, and ℕ’ is some nonstandard countable model of true arithmetic, then *ℕ = *(ℕ’).
The proof of this is pretty nice, but to get there I need to introduce a few more notions.
So far we’ve just talked about countable saturation. But there’s a more general notion of K-saturation for any cardinal K. A structure M is K-saturated if any set of formulas using less than K parameters that’s finitely realizable in M is also realizable in M. So in a slightly annoying terminological quirk, countable saturation is actually ℵ1-saturation, as “fewer than ℵ1 parameters” is the same as “countably many parameters”.
A structure M is called saturated if it’s |M|-saturated. These structures are “as saturated as possible”. Nothing can be K-saturated for a cardinal K larger than or equal to its own size (to prove this, add a parameter for every object in the structure and declare x to differ from each of them).
Saturation is a really strong constraint on a structure. It turns out that if two structures are elementarily equivalent, the same size, and saturated, then they are necessarily isomorphic. This means that for instance there’s at most one saturated countable model of true arithmetic (up to isomorphism). The same holds for saturated models of any cardinality of Tarskian geometry, the theory of real closed fields, and any other complete theory.
And now we’re ready for the proof!
Assume that M1 and M2 are elementarily equivalent structures in a countable language, and that |M1| = |M2| = ℵ0. Take each of their ultrapowers with index set ℕ and arbitrary ultrafilters, and call them *M1 and *M2. What size are these structures? Since they’re ultraproducts, they’re both ℵ1-saturated, which means that they cannot be countable. And they’re not finite, so they must be uncountable.
Furthermore, |*M1| ≤ |M1ℕ|, as the elements of *M1 are just equivalence classes on M1ℕ. So |*M1| ≤ |M1ℕ| = ℵ0ℵ0 = 2ℵ0. Assuming the continuum hypothesis, 2ℵ0 = ℵ1. So ℵ0 < |M1| ≤ ℵ1, meaning that |*M1| = ℵ1. But remember that *M1 is ℵ1-saturated! So it’s as saturated as can be! Thus we can say that *M1 is saturated. The exact same argument goes for *M2. So *M1 and *M2 are saturated elementarily equivalent structures, and they’re both cardinality ℵ1. So they’re isomorphic!
Thus the continuum hypothesis tells us that ultrapowers erase differences between elementarily equivalent countable structures. Even though countable nonstandard models of TA look so different from the standard model, their ultraproducts are isomorphic. In particular, addition and multiplication are computable on ℕ and uncomputable on any nonstandard countable model of arithmetic. So according to CH, computable and uncomputable structures can have the same ultrapower!